基于TMS320DM642在移动平台ATP技术中的应用

1 引言
空间光通信采用激光作为载波。与传统微波通信相比,空间光通信具有传输容量大、方向性强、传输速率大、保密性好等优点,在卫星和航空航天等大容量通信方面具有巨大的应用前景。但由于激光具有波束窄、发散角小的特点,空间太阳、月亮等星体背景光的干扰,加之远距离通信信道对光信号的极大衰减等因素,因而空间光通信能够快速实现卫星、飞机等空间移动平台的捕获、跟踪和瞄准(Acquisition,Track—ing,Pointing,简称ATP),并建立稳定而有效的通信链路。因此,介绍了一种基于DSP的移动平台ATP技术的应用设计。
2 系统硬件设计
2.1 ATP系统架构
为了模拟实验空间移动平台ATP过程,设计一套地面模拟ATP系统。整个系统分为图像处理模块、电机控制及驱动模块、二轴电控转动平台、光学系统等,如图1所示。图像处理模块核心是图像处理器件。采用TMS320DM64(简称DM642)作为图像处理器,该器件是TI公司推出的一款针对多媒体处理应用的高性能定点DSP器件,它具有C64X内核,指令集与(264X全面兼容,其内部工作时钟达600 MHz,指令执行速度高达4 000~4 800 MI/s,它拥有3个独立配置的视频端口,可独立配置为视频采集或显示端口,采用EDMA方式快速地在存储器与视频端口之间传输视频信号,另外DM642还拥有多路音频端口(McASP0),32位主机接口(HPI),PCI总线接口,16位通用I/O端口(GPIO),3个定时器以及I2C总线模块。DM642对CCD采集的图像信号进行图像处理和分析,判断信标光是否进入视场,并利用灰度直方图算法计算目标与背景间的阈值,再利用质心算法得出信标光坐标,并将信息实时传输给电机控制部分。
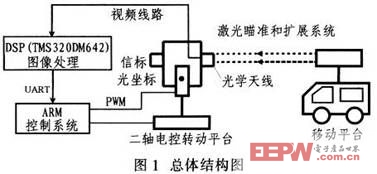
电机控制器采用专门用于工业控制的LPC2114ARM及其外围电路。LPC211ARM采用ARM7TDMI—S核技术,采用RISC指令,流水线执行结构,嵌入式操作系统移植性强。根据DSP处理后的信息调整载有CCD的二轴电控转动平台。
电机驱动器采用新型的双极性恒流斩波驱动技术,光电隔离信号输入,自动半流,可设置最大2 A电流和最大125级细分,振动和噪声小。
二轴电控转动平台按照水平和俯仰两个方向转动,其水平方向无最大角度限制,而俯仰方向接近360°,通过ARM控制器实现该转动平台的方位和俯仰角的精密转动。驱动器为最大值128细分时,其方位和俯仰角的转角精度达2.725μrad和1.635μrad。
光学系统由信标光发射和CCD接收部分组成。CCD有效像素为582(H)×512(V),像素尺寸为8.25(H)μm×7.03(V)μm,接收灵敏度为0.005勒克斯,CCD的视场角为3°x3°。CCD安装于二轴电控转动平台,相当于光学天线,用于接收光信号,通过ARM电机控制实现CCD的全空间扫描和信标光接收。信标光置于单片机控制的小车,模拟实现空间移动平台的运动。






评论