机器人:在一个月之内实现原型开发的四个平台

目录
1.使用LEGO MINDSTORMS NXT进行原型开发
2.使用iRobot Create进行原型开发
3.使用NI Single-Board RIO和NI CompactRIO进行原型开发
4.使用Mobile Robots Inc.进行原型开发
从工业自动化机器直至模仿人类行为的类人机器人,都要求使用当今最高级的控制系统和复杂机械结构。机器人 通常部署在动态环境中,这使得开发更具挑战。即便是最先进的软件仿真也无法仿真现实环境中的所有变量。要了解机器人在投入实际应用前如何响应不同的状况, 功能原型是十分重要的。
将NI LabVIEW图形化系统软件与商用硬件整合在一起,您可以在一个月内开发软件,并完成功能齐全的原型系统。您需要根据一系列因素进行开发平台的选择,其中包括价格、灵活性、I/O数量、处理器速度、坚固性和板载传感器。一些用于原型开发的通用平台使用了LEGO® MINDSTORMS® NXT、嵌入式NI CompactRIO和NI Single-Board RIO系统。表1提供了可用平台的比较。
表1:针对不同应用和价位的机器人都有相应的原型开发平台。

使用LEGO MINDSTORMS NXT进行原型开发
LEGO MINDSTORM NXT包含智能的、用于计算机控制的LEGO模块,是预算较少的情况下进行原型开发的理想选择。它包含32位ARM微控制器,可以用于和多种传感器及电机 一起使用。通过使用用于LEGO MINDSTORMS NXT的LabVIEW工具包,您可以创建程序并直接下载到NXT模块上。NXT模块使用10位模拟数字转换器(ADC)作为输入,可以作为数据采集单 元,控制多达三个电机和转数器。
新加坡义安理工学院的工程学院开发了视觉引导的自动化机器人,用于捡网球。通过使用相机采集图像和NI机器视觉软件完成目标跟踪,机器以高精度和高速度完成了这个任务。在实际应用中,您需要更大的捡球系统完成整个网球场的任务,但是新加坡义安理工学院通过在NXT原型上测试其理论算法,从而降低了成本。
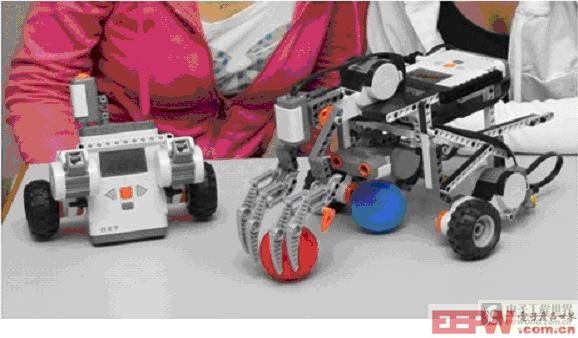
图1:新加坡义安理工学院工程学院使用LabVIEW开发了视觉引导的自动化机器人用于捡网球。











评论