三坐标测量系统的开发及其在航天器检测中的应用

经纬仪大尺寸三坐标测量系统近年来在航空、航天、天线、汽车、水利、机械和测绘等行业的研究与应用已逐渐展开;随着近年来我国航空、航天部门企业技术改造的进行,已从国外引进了近百套成熟的大尺寸三坐标测量系统,其中以瑞士Leica公司的经纬仪测量系统ECDS3、MANCAT和Axyz STM/MTM居多,对于应用规模和领域的迅速扩大而言,国内的研究与开发则相对落后了;且以往的研究与应用主要是针对两台传感器的,由于受硬件条件的限制,对多台传感器以及既有角度又有距离的混合传感器构成系统的研究与实现比较少。本文着重解决的问题则是对多台仪器构成混合测量系统的研究与开发,本着立足现有设备,吸收国内外先进技术,使整个系统的性能价格比最优的原则,经过充分的调研、选择比较、试验,开发出了大尺寸柔性三坐标测量系统MetroIn,该系统已成功应用在航天器推进舱圆度检测、天线面形测量、三峡大坝机组座环检测和大型闸门的安装与检测等项目中。
1 系统设计基本思想
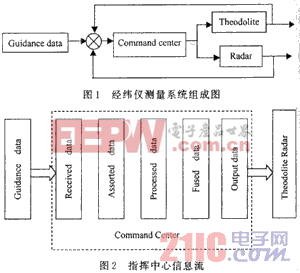
经纬仪大尺寸三坐标测量系统MetroIn是由多台电子经纬仪或全站仪构成的混合测量系统。该系统以经纬仪或全站仪为传感器,最终获取目标点的空间三维坐标,利用数据库来管理测量数据,并可对测量数据进行长度、角度等几何量计算与形位误差的测量分析。系统的基本流程如图1所示。
2 系统基本配置
MetroIn的基本配置,硬件主要为两台或多台电子经纬仪或全站仪(Leica、Topcon、Zeiss、Sokkia等)、486以上台式或便携机一台(操作系统为Win95/98/2000)、多路串口转换卡、LINK2一个、基准尺一根、激光目镜及照准标志、与电子经纬仪相配套的高稳定度脚架、联机电缆等构成。
3 系统软件
3.1 功能介绍
系统软件功能主要包括以下几个内容:
(1)设备联机
设备联机包括计算机与经纬仪的联接和经纬仪内置参数的初始化。采用键盘模拟技术,由计算机控制经纬仪完成各项初始化参数的设置。
(2)系统定向(建立经纬仪测量坐标系)
要实现对空间点的三维坐标的测量,首先必须建立系统坐标系,即要确定传感器之间的相对位置(相对定向)和绝对尺度(绝对定向),我们称之为系统定向。
系统定向是通过测站(仪器)间进行互瞄或观测一定数量的物方点和基准尺并进行平差计算而建立系统统一的测量坐标系。系统定向完成后,各测站间的相互位置关系已确定,就可以对空间可视点进行联机在线测量,并实时解算出其三维坐标。
系统定向是最为关键的步骤,定向的好坏直接影响着后续点坐标测量的质量。
(3)在线坐标测量
系统定向完成后,即可进行实时三维坐标测量。对于一般工件可事先用专用标志标出待测点,然后通过逐点观测,确定各点的空间坐标。对于不可接触的工件或粘贴标志有困难时,可用激光束投影到工件上形成激光点,利用激光点作为测量标志。多台经纬仪的系统在定向完成后可以二台或多台间构成多个测量系统同时开展测量工作,测量坐标均在统一的测量坐标系中,测量数据显示在屏幕的不同窗口中。全站仪和经纬仪的组合测量系统中,全站仪可单独采集坐标数据,亦可与经纬仪一起交会采集坐标。
(4)数据管理及编辑
内部数据管理器窗口界面类似于Windows的资源管理器,其左面是一树形结构,为数据库的主要列表,如工件、设站、基准尺、反射片和参考库、坐标系等。右面是左面选中的具体数据库的各个数据库表及其内容显示,如点坐标、观测值等。可编辑各数据记录、添加一条新的记录(如3维点坐标)、删除记录和对记录进行排序。对数据库表中的数据可选中或复合选中某些行进行编辑处理。操作是直接对数据库进行的,每次操作即更改数据库中的内容,这点相当于及时自动存盘。对每一条记录都可进行编辑,但所有原始观测值只可读,不可更改。
(5)坐标系的生成与转换
通过平移、旋转、缩放可生成一个新的坐标系。此外还有两种方法,即轴对准法和最小二乘转换法。如用不在一直线上的3个点轴对准生成一坐标系。其中,第一点确定坐标系原点,第二点定x轴,第三点定z轴。利用公共点最小二乘转换法可以将测量数据与工件的设计数据转换到同一坐标系中进行比较。有了坐标系的生成与转换功能,就可以很方便地对不同坐标系下的数据进行分析处理。
(6)测量数据分析与计算
依据坐标测量结果可进行各种点、线、面的分析、计算。如点、线、面之间的距离;线线、线面之间的角度计算,点线、点面、线线、线面等之间的平行、垂直及平分关系的分析与计算;利用测量数据拟合生成标准形状,并对直线、平面和圆等形状误差进行检测;拟合生成的各种几何形状可以存入数据管理器的形状库中。
(7)参考数据的放样与测量
将理论的设计数据输入到参考库中,通过测量恢复设计坐标系后,将设计数据转换成相应的角度信息,并在实地指示出来。
(8)数据的输入、输出
MetroIn系统不仅使用它本身的数据,也能兼容外部数据。可将外部数据直接输入到某指定工件并转换到特定坐标系中;点坐标及其观测值可以输出到相应格式的文件中;定向的结果可以进行打印输出。
(9)三维图形显示
联机或脱机测量数据可以三维可视化显示,其中包括离散的单点显示、拟合计算的基本几何形状(如直线、平面、圆柱、球等)显示,并可对视图进行任意视角观察,使得我们对测量结果有个直观的感觉。
4 系统的主要数学原理
4.1 系统定向
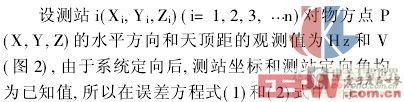
经纬仪三坐标测量是基于角度前方交会的三角测量原理,而对多台仪器构成的测量系统,由于“甬余”数据的存在,对定向和坐标解算算法有两种方法:一种是基于仪器精确整平的测站三维网平差的方法;另一种是建立在摄影测量学共线方程基础上的光束法平差法。下面主要介绍前一种方法的数学原理。多台仪器的系统定向也就是确定仪器各设站点的相互位置关系,其实也就是测站点三维控制网的解算。经纬仪三坐标测量系统三维控制网中的观测值仅为水平方向值和天顶距(或垂直角),再加上必要的相对控制条件(如基准尺的长度)即可完成网的平差解算。
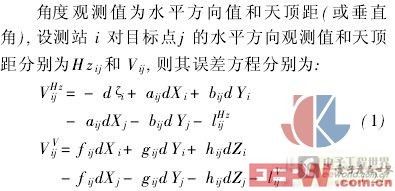
在测站三维控制网中,加入基准尺的测量是为了给网提供一个尺度控制条件。基准尺两端点间的长度已知,基准尺的测量即构成距离条件。
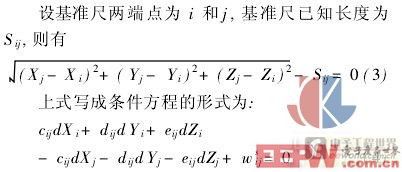
以上各误差方程的系数和常数项可参见文献6。测站三维控制网引入相对控制(距离)条件后,平差处理可分为两种类型。一是把相对控制视为确定值,作为条件方程与角度观测方程构成附有条件的间接平差模型进行处理;二是视相对控制为观测值,将条件方程化为虚拟观测值误差方程,并赋以一定的权,同角度观测值一并按间接平差进行处理。
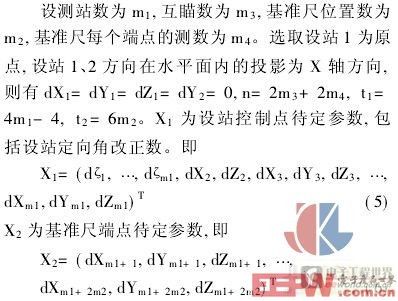
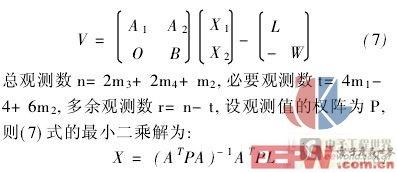
把相对控制看成是虚拟观测值,则可得间接平差模型:
4.2 在线测量
系统定向完成后,各测站间的相互位置关系已确定,就可以对空间可视点进行在线点测量。所谓混合测量系统就是指既有经纬仪也有全站仪组成的测量系统,对物方点的测量既有角度观测信息,也有距离观测信息。




评论