基于车车通信的路况信息采集算法

关于车车通信的研究早在20世纪80年代在日本、欧美等国家纷纷启动。我国对车车通信的研究起步比较晚,主要有清华大学专家研究提出了一种基于车车通信的交通信息采集方法,设计了相应的无线交通信息服务系统(WTISS)原型;武汉理工大学的学者们在基于自组网的车车通信研究中,旨在通过车车通信解决交通中的紧急情况报警及刹车辅助等。
另外,上海交通大学研究一种基于Ad Hoc无线网络的自主式道路通行状况信息系统,该系统主要是通过每辆车与对向车的自组网连接,并周期性地广播自身车辆采集的信息,了解该车行驶前方道路的拥堵情况。该方案存在以下问题:首先,当车辆密度较大时,周期性的信息广播必然造成无线网络的过载;第二,对于无对向车的单行线,以及对向车无车辆行驶的道路交通路况信息无法掌握;第三,由于该系统仅依赖对向车采集,其路网覆盖率相对较低,实时性及信息覆盖范围会受到一定限制。本文提出的采集算法及系统工作流程旨在解决这些问题。
1 车车通信过程
本文介绍的车车通信中,车辆间的交互信息为车辆自身采集信息,如何通过车辆自身采集信息获得其当前的路况信息是本文的研究重点。
车辆自身采集信息的构成包括车辆行驶的路段(包括方向)、行驶距离、行驶时间、采集的时间戳,以及必要的车辆标识信息。其信息内容格式见表1。
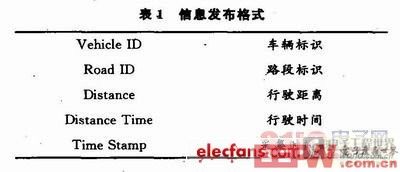
图1是车辆行驶过程,其中,A,B,C,…标识路段;d0表示路段起点的距离偏差;d1表示信息采集末端到路段末端的距离偏差;S0表示实际路段长度;S表示车辆采集信息所行驶的路段长度;(x1,y1,t1),(x2,y2,t2)是车辆驶入和驶出路段的位置和时间。

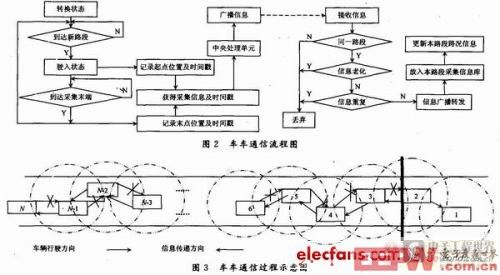
车车通信流程可分为发送采集信息的流程和接收外界信息的流程两个部分,如图2所示。其中,虚箭头左端是节点采集信息流程;右端是节点接收外界信息的流程,虚箭头表示一节点向另一节点发送信息。
 [next]
[next]2 车车通信模型
按照上述设计,车车通信模型如图3所示,其中车辆节点用长方块加数字来识别;圆形虚线指车辆节点的通信区域;箭头线表示某车辆节点发出广播包到另。一个车辆节点;“×号”表示目的车辆节点的丢弃信息。
3 信息采集算法
如图3所示,假设某路段共有N个车辆节点,t时刻某车辆i接收到了N1辆车的路况信息,此时处理后的路况信息可用速度表示如下:

式中:Si,Ti为车辆i驶过该路段的距离及所用时间。过一段时间后,在t’时刻该车辆又获得了N2辆车的信息,那么它处理后的路况信息用速度值表示为:

假设路段起点及路段末端的偏差相同,即每个车辆行驶的距离都为S,则t’时刻接收到的信息采集车辆(M辆)与该路段总的信息采集车辆(N辆)所采集的路况信息(速度)统计误差率为:

由上式可以看出,接收且统计的信息来源车辆数M越接近该路段信息采集的车辆总数N,采集的路况信息越接近实际,当M=N时,e=0。
4 仿真平台和仿真结果
根据该系统工作方式,本仿真基于NS2网络仿真模块模拟自组织网络(Ad Hoe),底层采用IEEE802.11无线协议。在仿真过程中车辆的速度在一个范围内随机取值,广播通信的实现是在AODV协议的基础上做了相应的修改。为了比较不同通信方式的效果,本文增加了对车辆单播通信的仿真模拟,其具体流程与广播类似。在广播与单播通信方式下,车辆获得的路况信息统计值与真实值之间的平均误差率如图4所示。

在仿真过程中发现,单播传递过程会有大量的丢包现象,分析其主要原因是单播包文的转发主要依靠某些路由协议转发数据包,车辆节点密度越大,丢包越严重,这也是选择广播通信的一个原因。
5 结语
目前车车通信技术的研究多处在研究阶段,本文提出的算法针对现有一些研究的相关问题及不足进行了改进。通过采用路段末端处发送广播信息可避免周期性的广播及减少信息量;采用行驶距离与行驶时间的速度计算可获得较准确的路况信息;同时,车辆信息的传递不局限于对向车。最后,通过上述算法的仿真可看出,改进后的算法具有一定的有效性及参考意义,今后将需进一步深入研究,并利用一些交通仿真系统进行更加真实的模拟测试。

评论