基于自适应模糊PID智能车用直流电机控制器仿真研究

智能车是一种集环境感知、规划决策、自动行驶等功能于一体的综合系统,具有时变且非线性特点。其中控制算法对智能车起着关键作用,传统的PID控制难以得到很好的效果。采用自适应模糊PID控制算法可以使系统具有很好的动态响应性能,并且可以对PID参数进行在线自调整,提高了系统的适应性和鲁棒性,改善了系统的稳态误差和效率,并使其抗干扰能力明显提高。
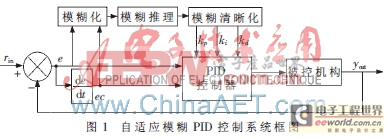
1 自适应模糊PID控制器
自适应模糊PID控制器结构如图1所示,自适应模糊PID是在PID算法的基础上,通过计算当前系统误差e和误差变化率ec,利用模糊规则进行模糊推理,查询模糊矩阵表进行在线参数调整。本系统通过增量式旋转编码器对速度进行检测,经过信号转换与单片机进行通信,将输入给定信号r与反馈信号y进行比较得到误差信号e和误差变化率ec,并找出PID 3个参数与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理对3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,使被控对象有良好的动、静态性能。
自适应模糊PID控制器以e和ec作为输入,可以满足e和ec对PID参数自校正自调整的要求。从系统的稳定性、响应速度、超调量和稳态精度等方面来考虑,kp、ki、kd的作用如下[1]:
(1)比例系数kp的作用是加快系统的响应速度,提高系统的调节精度。kp越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至导致系统不稳定;kp取值过小,则会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变坏。
(2)积分作用系数ki的作用是消除系统的稳态误差。ki越大,系统的稳态误差消除越快,但ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调;若ki过小,将使系统稳态误差难以消除,影响系统的调节精度。
(3)微分作用系数kd的作用是改善系统的动态特性,主要反应偏差信号的变化趋势,并能在偏差信号值变得太大之前,在系统引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
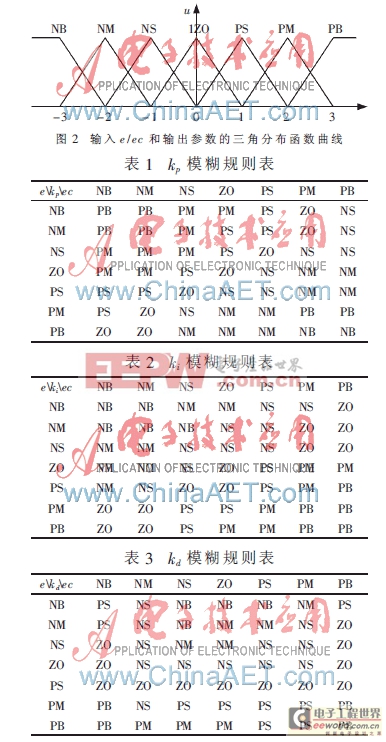
根据上述整定原则将kp、ki、kd、ec、e变化范围定义为模糊的论域:{-3,-2,-1,0,1,2,3},它们的隶属函数均选择为三角分布函数,如图2所示(横坐标表示e/ec的整数论域中的分布,纵坐标表示隶属度)。采用Mamdani模糊推理系统,清晰化法为重心法,则可以建立针对kp、ki、kd 3个参数的模糊规则表[2],如表1、表2、表3所示。在模糊规则表中kp、ki、kd、e、ec均取7个模糊子集,其语言值分别为{正大,正中,正小,零,负小,负中,负大},用{PB,PM,PS,ZO,NS,NM,NB}表示。
2 智能车直流电机控制系统的数学模型[3]
智能车直流电机驱动系统如图3所示。施加于电枢端的电压u产生电枢电流i,i与磁钢产生的磁通相互作用,产生的电磁转矩驱Te动负载。

pid控制器相关文章:pid控制器原理
评论