基于舵机控制的仿生鱼设计

仿生机器鱼的提出有着深刻的意义,它具有效率高、机动性好、噪音低、对环境扰动小等优点。仿生机器鱼可以作为一个载体,根据需要装配相应的硬件,可在水面环境检测、复杂环境中的水中作业、海底生物观测、军事侦察等方面发挥重大作用。当然,作为一个载体,必须完成基本的运动,那就是能够自动避障。
1 鱼类推进理论
鱼类行为学者的研究表明,大多数鱼类把身体当作推进器,身体左右摆动击水,利用其产生的反作用力使鱼体向前推进,基于这种推进原理,学者们提出了所谓的“波动推进理论[1]”的鱼类游动机理,该理论主要以鱼的脊椎曲线为研究对象,鱼体之所以能够前进,是因为脊椎曲线带动它所包络的流体向后喷出,产生推力使鱼向前,其游姿可以近似为正弦波,如图1所示。
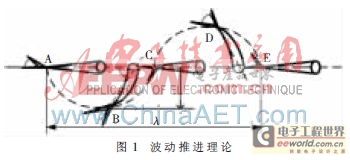
设脊椎曲线包络的工作质质量为M1,躯体对地速度为VB,λ是波长,f为摆动频率,工作质对地速度为VW,由于鱼体在水中的阻力与速度呈递增关系,故在启动瞬间,鱼体受到的阻力可以忽略不计,因此根据动量守恒定理有公式(1)、(2):

Y是一个小于1的系数,它表征了鱼类的几何特征、体重对速度的影响,称之为动力特征系数,波动推进假设是建立在对脊椎曲线包络的水的质量积分和动量定理之上。鱼游动时使流体产生了分离,并且以漩涡的方式抛出尾部,漩涡的抛出速度和摆动频率一致,在一个周期内,尾部产生一对旋向相反的漩涡,推动鱼前进。由此根据波动推进理论,利用舵机设计一种三关节仿生鱼,以实现仿生鱼的前进和自由转向。
2 仿生鱼结构设计
目前一般用于机器鱼外形设计的仿生对象有金枪鱼、梭子鱼、鲤鱼、鳗鱼。这几种鱼或者具有极高的游动速度,或者具有优异的机动性能,或者具有绝佳的游动效率,它们都符合“波动推进理论”的运动模式,因而成为仿生鱼模仿的典范。这些鱼类的外形呈现为流线形,不仅从鱼头到鱼尾的水流运动平稳,而且水动力学阻力也很小,显示出这类外形具有良好的水动学性能。因而,这类流线形鱼体成为机器鱼外形设计的最佳选择[2]。
设计的仿生鱼的外形也是设计成流线形的鱼体。它由鱼头、鱼体、鱼尾鳍三部分组成,鱼体部分共有3个关节,每一个关节由一个伺服舵机控制,可以实现本段和前段的相对转角位移。
鱼头采用直径为120 mm×250 mm的塑料圆柱,考虑浮力平衡,为了保证材料浮动在水里,在普通车床上钻了直径为55 mm、孔深为100 mm的内孔,中心掏空以减轻重量。然后在加工中心平台上加工弧线部分,在电脑上用UG软件画出鱼头的弧线图形,并在两边掏孔,安装传感器,做为鱼的眼睛。
鱼体由3个舵机组成,舵机之间的连接采用L型架和U型架铝材,它的质地较轻,强度较高。L型架与U型架之间使用轴承连接,有利于减小各个舵机转轴所受的弯矩,使摩擦减小,转动灵活[3]。
尾鳍设计是用铅笔在塑料板上画出所需要的鱼尾形状,再经过抛光等工艺完成尾鳍部分的加工。通过数控机床加工出舵机与尾鳍的连接部分。整体效果如图2所示。

3 仿生鱼软件设计
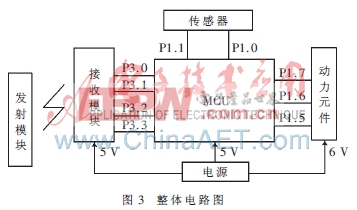
为了满足设计要求,采用3个舵机设计了鱼的三种姿态:前进、右转弯、左转弯。用传感器的检测信号来控制鱼的姿态,当传感器没有接收到障碍物的信号时,3个动力元件(舵机)分别以不同的角度来回摆动,以实现完美的前进方式。一般靠近尾部舵机的摆动角度最大,其他逐渐减小。当检测到信号时,尾部舵机来回摆动,其他两个舵机在一个方向摆动一定角度后保持不变,以实现转弯。无线发送接收模块用来下达指令。整体电路图如图3所示。
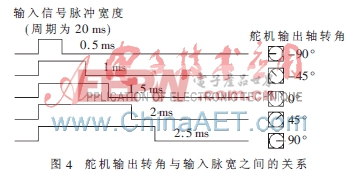
标准的舵机有3条导线:电源线、地线和控制线, 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源,一般取5 V。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比[4]。舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用图4来表示。

评论