基于PLC的自动寻迹运输车控制系统设计

提高现代化工厂部门之间物料搬运和内部运输的协调性,是实现生产全盘自动化的重要举措。传统物料运输车具有设备复杂、功耗大、投资高、污染环境等缺点,其中有轨运输车需铺设专门轨道,若生产程序改变,需重新铺设轨道,破坏路面,投资高;无轨运输车包括叉车及手推运料小车,均需专人驾驶,劳动强度大CONTROL ENGINEERING China版权所有,运输效率低。
本设计采用光电检测技术,以日本三菱公司生产的FX-2N可编程控制器为控制核心,通过编程实现智能控制。若生产工序改变,只需重新铺设光轨便可以相应改变。是一种新型、高效、无污染的自动寻迹运输车,无人驾驶、安全可靠、操作方便。可降低生产成本,提高生产效率。
1系统总体方案
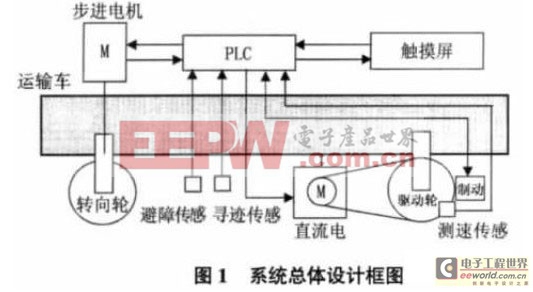
系统总体设计框图如图1所示,直流电机固定在运输车底座下侧,驱动后轮前进,步进电机控制前轮转向,PLC作为控制系统中心,并与步进电机、直流电机及触摸屏相连,得到速度、位置和障碍物信息同时输出相应的控制命令到直流电机、电磁制动器及步进电机。触摸屏作为操作界面CONTROL ENGINEERING China版权所有,给用户提供一个可视化的操作平台。
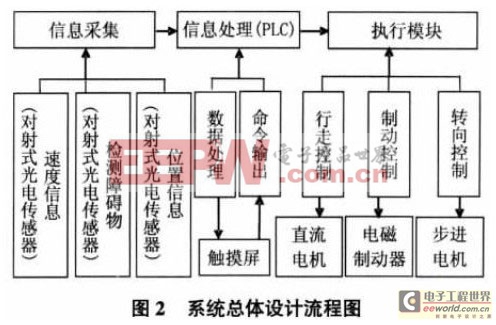
系统设计可划分为信号检测部分和控制部分。其中,信号检测部分包括轨道线检测设计、障碍物检测设计、速度检测设计,控制部分包括驱动控制设计、制动控制设计、转向控制设计。系统总体设计流程图如图2所示。
运输车循迹采取光电探测法的原理。在车体底部安装3只光电传感器,运输车在地板上按照引导线自动运行时不断地向地面发射红外光。由于光电管对不同颜色的物体表面具有不同的反射性质的特点:当红外光遇到绿色引导线时发生漫反射www.cechina.cn,反射光被装在运输车上的接收管接收,输出为低电平;如果遇到其他颜色则红外光被吸收,输出为高电平。可编程控制器便可根据3只光电传感器的状态编码为依据来确定引导线的位置和运输车的行走路线闭。运输车自动寻迹的位置状态编码如图3所示。












评论