伺服系统位置控制中的“电子齿轮”分析

现代工业的发展,在机械加工,冶金制造、分切输送、机器人或机械手等领域,被控对象的动作越来越复杂化、多样化,它们都涉及到各自的位置定位,并且有着越来越高的控制要求。交流伺服系统是目前工业自动化传动技术的高端技术之一,它使得输出的机械位移(或转角)准确地跟踪输入的位移(或转角),数控技术确保执行元件跟随设定的指令,进行人们期望的运动。它具备有位置、速度和力矩三种控制方式,主要用于高精度的定位,可以满足各类复杂机械位移(或转角)变化定位要求。
◆ 对“电子齿轮”的理解
伺服系统一般具备三大环节:伺服电机、伺服驱动器和实施控制的上位机,上位机大都用PLC或单片机。如图: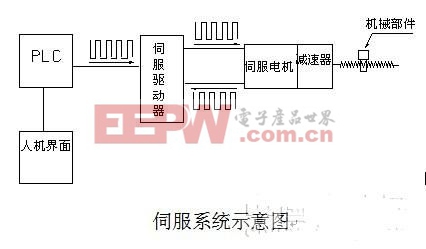
伺服电机是这个系统的执行元件,伺服系统靠脉冲来定位,而位置控制的基本点是上位机依据被控对象的具体控制要求,编制程序;伺服驱动器执行上位机程序,输出脉冲。这样,带有特定程序规则的脉冲电源让伺服电机驱使机械部件实现位移或转角,完成工序作业任务。可见无论控制对象的要求千变万化,其准确的位置定位必然与脉冲的数量和每单位脉冲期间机械部件的移动量这样两个要素密切相关。
就机械构成而言,伺服电机输出轴与负载输入之间通常都有减速装置,它反映了伺服电机与负载输入之间转速的对应(倍率)关系,俗称速比。由于机械结构的特点,这样的机械传动系统一旦确立,那么减速装置的速比就是固定的,如果需要调整,就意味可能废除原有硬件,重新制作安装,显然不是很方便。能不能找到更方便且有效的途径,让机械系统的速度变化在一定的范围内可调整、设定呢?
微电子技术和大功率电力电子技术的发展产生了伺服驱动器,它采用数字信号处理器(DSP)作为控制核心,实现比较复杂的控制算法,达到数字化、智能化;其功率器件采用以智能功率模块(IPM)为核心的驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护,在主回路中还加入软启动电路,以减小启动过程中的浪涌电流对驱动器的冲击。伺服驱动器的输出电源是对交流三相或单相电进行整流,得到相应的直流电,通过正弦脉宽调制(SPWM)电压型逆变器变频来驱动伺服电机。这样伺服电机接受来自驱动器输出的脉冲,在脉冲宽度的时间段内,电机实现位移,一串这样的脉冲就使得电机旋转起来,进而驱动机械负载。由于伺服驱动器输出电源采用了正弦脉宽调制技术,这种技术的特点是输出的脉冲串不等宽,它可以根据控制信号来产生脉宽。如此,伺服电机的移动量就可以随脉宽的可控特性来选择、设定,灵活调整而未必变更硬件。换句话说,即使相同频率的脉冲串,由于用户对电机在其对应的脉冲宽度内移动量的设定值不一样,电机速度乃至负载侧速度就会不一样,它所起的作用与机械变速齿轮相似,但是却不像机械变速齿轮那样有形,于是有了个与机械对应的说法:“电子齿轮”。三菱电机自动化有限公司这样描述“电子齿轮”的作用:机械可以以任意倍率的输入脉冲进行移动。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)
伺服电机相关文章:伺服电机工作原理







评论