宝莱车的CAN总线特点分析

随着人们对汽车动力性、操纵稳定性、安全性和舒适性的不断追求,现代汽车上安装了很多电子控制设备、电子部件、专用传感器和功能各异的执行装置。为了解决汽车电子系统控制中,许多动态信息资源共享、信息处理的实时性等问题,大多数中、高档汽车上都采用了CAN总线技术作为控制器联网手段。宝莱车的CAN总线具有高可靠性全面提高了宝莱车的动力性、经济性和安全性。
一、宝莱车CAN总线的组成与结构
宝莱车采用两条CAN总线,即驱动系统CAN总线和车身系统CAN总线,这两总线完全能够满足ISO的定义。驱动系统CAN总线,其通信速率为500kbps,被称为高速CAN,其连接对象为汽车动力和传动机构的控制单元等。汽车发动机控制单元、自动变速器控制单元、ABS控制单元、安全气囊控制单元等。车身系统CAN总线,其通信速率为100kbps,被称为低速CAN或舒适系统CAN,其连接对象为中央控制器,4个门控制器等。此外宝莱车还有一个重要特征,便是在车身系统的CAN中引入了网络管理的概念。这对于事件触发性质的数据通信来说是非常合适的。
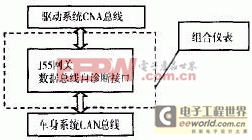
用于驱动系统的高速CAN和用于车身系统的低速CAN是两个相互独立的总线,但从资源共享的角度来看,它们之间最好有座连接桥梁,以使车身系统也能获得驱动系统的信息。当然,从传统思路来考虑,只要增加几根导线似乎就能解决问题。但从实际开发时,即在现有的控制器硬件上,要增加哪怕一个信号引出脚都将导致硬件的重新设计,往往成本和进度都不允许这么做。为了获得对方系统的信息,而又不涉及到硬件上的任何改动,宝莱车使用了网关—J533完成了此任务,宝莱车的网关是“寄生”在组合仪表内的如图1所示。
二、宝莱车驱动系统CAN总线
宝莱汽车上典型的与驱动系统有关的控制单元有电控燃油喷射系统、自动变速器系统、防抱死制动系统(ABS)、安全气囊系统等。
由于每个控制单元对实时性的要求是因数据的更新速率和控制周期不同而不同的,为了满足各子系统的实时性要求,与对公共数据实行共享,如发动机转速、车轮转速、油门踏板位置等,如宝莱车的4缸汽油机运行在4000r/min,则电控单元控制两次喷射的时间间隔为6ms,其中喷射持续时间为30度的曲轴转角(1ms),在剩余的5ms内须完成转速测量、油量测量、A/D转换、工况计算、执行器的控制等一系列过程。这就意味着数据发送与接收必须在1ms内完成,才能达到汽油机电控的实时性要求。这就要求其数据交换网是基于优先权竞争的模式,且本身具有极高的通信速率,宝莱车采用了CAN总线正是为满足这些要求而设计的。
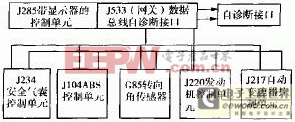
宝莱汽车驱动系统CAN的主要连接对象如图2所示。显然,将以上控制器归并到一根总线上是非常合理的。因为它们所具备的基本特征是一致的,所控制的对象是与汽车的行驶直接有关的系统,它们之间存在着较多的信息交流,而且很多都是连续的和高速的。这样可提高发动机的动力性、经济性和排放性能。
二、宝莱车驱动系统CAN总线
宝莱汽车上典型的与驱动系统有关的控制单元有电控燃油喷射系统、自动变速器系统、防抱死制动系统(ABS)、安全气囊系统等。
由于每个控制单元对实时性的要求是因数据的更新速率和控制周期不同而不同的,为了满足各子系统的实时性要求,与对公共数据实行共享,如发动机转速、车轮转速、油门踏板位置等,如宝莱车的4缸汽油机运行在4000r/min,则电控单元控制两次喷射的时间间隔为6ms,其中喷射持续时间为30度的曲轴转角(1ms),在剩余的5ms内须完成转速测量、油量测量、A/D转换、工况计算、执行器的控制等一系列过程。这就意味着数据发送与接收必须在1ms内完成,才能达到汽油机电控的实时性要求。这就要求其数据交换网是基于优先权竞争的模式,且本身具有极高的通信速率,宝莱车采用了CAN总线正是为满足这些要求而设计的。






评论