一种基于CAN总线的监控系统设计及位定时分析

引言
can(controller area network)即控制器局域网,是国际上应用最广泛的现场总线之一。与一般的总线通信相比,can的数据通信具有突出的可靠性、实时性和灵活性。本课题设计了一种基于can总线的监控系统,并对位定时这一关键问题进行了详细的阐述。借助该系统,使用者可以实现对can网络的实时监控,并可对系统参数进行优化。
监控系统整体结构
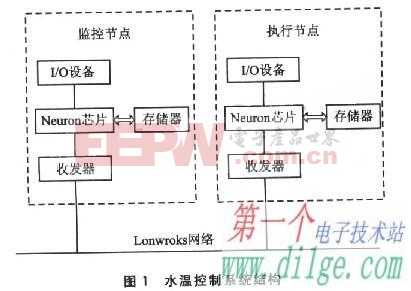
整个监控系统(如图1)是一个分布式控制系统,由三部分组成:上位机、转换模块、can节点。上位机负责监控整个系统的运行状况;转换模块作为各个节点与上位机的通信中介,实现上位机与节点间的双向通信;各个can节点均可以在任意时刻,遵循通信协议完成上传信息和执行控制命令等任务。

can节点接口电路设计
can总线上各节点均采用atmel公司生产的8位单片机为主控器,除完成节点自身的控制功能外,还与can控制器sja1000配合以实现can网络通信功能。
设计中选择sja1000控制器并采用其性能优越的pelican扩展模式。can收发器tja1050是philips公司生产的高速can总线驱动器。tja1050具有速率高、低功耗、电磁性能优越等特点。can接口电路如图2所示。
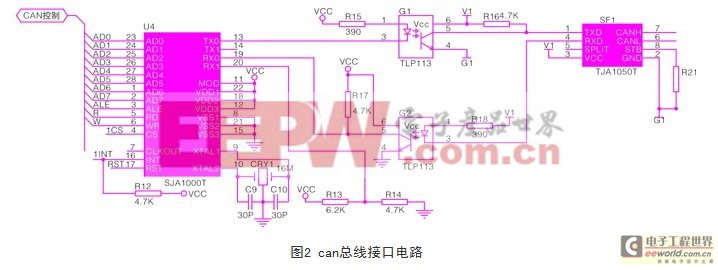
节点模块中采用高速光耦来实现收发器与控制器之间的电气隔离,抗干扰。光耦选择高速器件tlp113以满足在最高速率500kbps下的电气响应。采用dc/dc模块提供5v电源并实现系统电源与网络电源之间电气隔离措施。为了确保该系统的安全,在dc/dc模块及系统的输入和输出端增加tvs保护。
系统通信的实现
can控制器协议
can控制器实现的串口通信网络遵循osi模型,划分为两层:数据链路层和物理层。物理层按照ieee802.3lan标准构造,实现将数据发送到传输介质上和接收数据流的功能。在数据链路层实现比特流的拼装。can通信协议约定了4种不同的帧格式,本系统中使用标准帧格式,其格式如表1。can首先接收到仲裁场,根据仲裁场的内容判断所接收到的信号是哪种帧格式,用户将相应的数据写入数据场中进行发送,或从数据场中读取接收到的数据。





评论