四轮转向汽车电子控制技术
4.1.3 车身横摆角速度传感器
车身横摆角速度传感器安装在汽车质心处的车身上,采用压电射流角速度传感器,检测汽车转向行驶时的车身横摆角速度,以电信号的形式输入ECU,ECU输出控制信号,实时控制汽车的转向运动,保证汽车转向行驶时的动态稳定性。
4.2 电控单元(ECU)
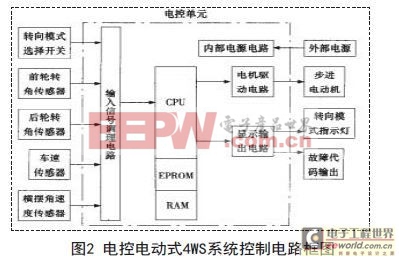
ECU是4WS系统的核心,其功用是根据制定的控制方案,按照编制的程序对各种传感器输入信号进行分析、计算、处理,输出一定的控制信号指令,驱动步进电动机动作。其电控单元的控制框图如2图所示,4WS系统ECU主要由输入信号调理电路、微处理器、输出信号处理电路、电源电路等硬件部分和控制程序、软件平台等软件部分组成。为保证控制系统可靠地工作,电控单元还必须采取有效的抗干扰措施和故障自诊断处理措施。
4.3 步进电动机
电动机采用步进电动机,其功用是根据ECU的指令输出适宜的转矩和转角,驱动后轮转向机构,控制后轮的转向,是后轮转向系统中的驱动执行元件。步进电动机是一种数字控制电动机,将数字式电脉冲信号转换成角位移,控制性能好,非常适合于单片机控制。采用步进电动机的主要优点是:步进电动机的角位移与输入脉冲数严格成正比,随动性好,可与角度反馈环节组成高性能的闭环数控系统;动态响应快,易于实现起停、正反转及变速;具有自锁和保持转矩能力;结构简单,坚固耐用,抗干扰能力强。
4.4 减速机构
减速机构的功用是降低步进电动机转速,增大步进电动机传递给转向传动机构的转矩,常采用蜗轮蜗杆机构或行星齿轮机构。
4.5 后轮转向传动机构
不同的车型,后轮转向传动机构的结构形式也不一样,可采用传统的转向机构形式,也可根据汽车后悬结构和行驶转向要求,设计特定结构形式的后轮转向机构。
5.电控电动式4WS系统的特点分析
5.1 电控电动式4WS与普通2WS系统对比分析
电控电动式4WS汽车与普通的2WS汽车相比,电控电动式4WS汽车具有如下特点:
(1)转向操作的响应加快,准确性高。
(2)转向操作的轻便性和行驶稳定性提高。低速时,转弯半径小,转向操作的机动灵活性提高(如图3所示)。
(3)超车时,变换车道更容易,减小了汽车产生摆尾和侧滑的可能性。抗侧向干扰的稳定性效果好。
5.2 电控电动式4WS与电控液压式4WS系统对比分析
电控电动式4WS系统与电控液压式4WS系统相比,也具有显着的优势:
①采用步进电动机作为后轮转向系统的驱动执行元件,动态响应快,改善了瞬态转向灵敏度,有效地降低了电控液压式转向系统的转向滞后特性。
②步进电动机的角位移与输入脉冲数严格成正比,在转动过程中,无累积误差,随动性好,转向控制精度高,回正性好。
③系统刚性大,有较高的惯性力矩,抗外界干扰的能力强。结构紧凑,体积小,质量轻,装配布置方便。
④步进电动机由蓄电池供电,发动机动力消耗。没有液压系统装置,系统的调整和检测方便,装配自动化程度高,能缩短系统产品的生产和开发周期。
6.电控电动式4WS系统的技术展望目前在成型的4WS汽车中主要采用电控液压式4WS系统。虽然电控电动式4WS系统发展较晚,相应的技术还不够成熟,存在动力小、ECU复杂、成本高等不足之处,但随着现代电子技术、电机技术的飞速发展和应用,电控电动式4WS系统在技术上将不断完善,在转向控制性能、系统布置、节能等方面也将越来越显示其优越性,其应用前景广阔,必将取代电控液压式4WS系统,并成为4WS系统发展的主流。它的发展趋势有以下几点:
(1)针对4WS系统,进一步开发、设计高性能、高精度、高灵敏度的传感器,以便于正确地检测汽车的运动信号。
(2)将先进的控制理论与控制方法应用于4WS控制器的研究中,提高转向控制性能。
(3)改进步进电动机的结构和控制技术,消除步进电动机工作时存在的振荡、失步、振动、噪声等不足。
(4)研究、设计结构合理、布置方便的后轮转向传动机构,实现后轮的正确转向。
(5)进一步简化系统,减小系统结构的体积,控制生产成本。
(6)把4WS技术与其它主动安全技术(如4WD、ABS、ASR、ASC、DYC等)相结合,实现汽车主动底盘技术的综合控制,这是主动控制4WS系统研究的长期目标。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理










评论