空气压缩机防喘振优化控制系统设计

分析空气压缩机防喘振控制系统现今应用较广泛的控制方案,并加以比较得出现有控制方案存在的优缺点。着重介绍模糊自适应 PID控制算法的好处,通过合理有效的控制方案使系统性能达到最佳,即保证了其有效的节能,又能保证其安全性。
1.压缩机喘振产生原因
喘振是压缩机固有的一种现象。发生喘振的原因有很多,不仅与其进出口流量有关,还与压缩机负荷,被压缩气体的分子量、温度、压力及管网容量有关。喘振发生的频率与压缩机管网的容量有关,管容越大,发生喘振的频率就越低;反之,频率越高。但其产生的主要原因还是因为压缩机工作流量小于最小流量。在压缩机的运行过程中,如果其吸入量减少到一定值,压缩比下降,输出管线中气体压力高于压缩机出口压力,被压缩了的气体很快倒流入压缩机,待管线压力下降后,气体流动方向又反过来。
此时,其吸入流量和出口压力周期性低频率大幅度波动,周而复始,产生喘振,引起压缩机轴位移,使轴产生弯曲造成机组振动加大,并波及到相邻的管网,喘振强烈时,能使压缩机遭到严重破坏。
2.防喘振控制系统
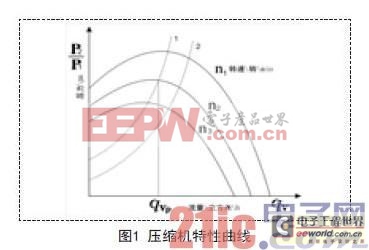
根据压缩机的主要原因,为不使压缩机出现喘振,需要保证在任何转速下,通过压缩机的实际流量都不小于喘振极限所对应的最小流量。在生产负荷下降时,须将部分出口气体经旁路返回到入口或将部分出口气体放空,保证系统工作在稳定区。目前工业生产上主要采用固定极限流量控制方案和可变极限流量控制方案。如图1所示为压缩机特性曲线1为喘振极限曲线,曲线2为防安全操作线。
2.1传统控制方案中存在的问题
在采用固定极限防喘振控制时,即决定了它只是为防喘振为目的,而不是根据工艺状况调整负荷的大小,一般适用于定转速或转速变化范围较小的机组。如果在机组转速较低的范围运行,会造成流量裕度过大,能量浪费严重,不利于节能。而可变极限流量控制是建立一条安全操作控制线,留有一定的安全裕度。
固定极限流量控制和可变极限流量控制都是不精确的近似方法通常都是提供一个很大的额外安全空间,保证机组在不理想的工况下运行,这种额外安全空间可能导致压缩机过多回流,降低了效率。考虑到气体温度及分子量对压缩机喘振流量的影响,喘振流量在出口压力、转速、入口温度、气体分子量实际上形成的是一个超曲面,即:

式中,Q为喘振流量;P为排气压力;n为转子转速;M为气体分子量;通常压缩机的参数控制是将(2)式简化为二元函数,这显然不够准确,达不到消除喘振的要求。上述两种方法不能完全补偿进气压力、温度、相对分子量的变化,从而具有一定的局限性。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理

.jpg)

评论