光伏电池阵列的研制

由于半桥母线电压为100V,单个管子承受耐压应该在100V以上,系统最大输出电流为3.5A。综合以上因素后,我们选择Infinion公司生产的IGBT单管IKW40N120T2,其耐压1200V,可通过的均值电流40A,且该单管价格便宜,开通、关断时间极短,开通压降只有1.7V,因此,开关损耗较小,是较理想的选择。
在本系统中,一共需要四路采集,分别是半桥高低端电压采集,输出电压电流采集。这四路信号都要设定过压或过流保护。采集电流信号使用电流传感器,采集电压信号使用电阻分压的形式。本设计的采集电路使用差分信号传输,并基于三级采集电路设计:首先使用全差分放大器LTC1992进行单端到差分信号的转换;然后使用模拟线性光耦HCPL7840进行信号隔离;最后使用仪用运放INA121将信号进行适当放大。
4 控制算法实现
4.1 寻找负载工作点的算法设计
光伏模拟器主要是跟踪负载的工作点,使得模拟器在不同负载情况下的输出能满足光伏阵列的输出特性。静态工作点的确定是模拟器的关键,如何在一特定负载下快速寻找到期望工作点,并使电源工作在这个点上。当负载变化,或是环境条件变化时,又如何找到新的工作点,并快速且精确的控制电源运行在这个工作点上,是模拟器控制算法所要解决的核心问题。
当负载电阻确定后,想要确定工作点处的电压电流,需要代入式(1)进行计算,但公式复杂,且涉及指数运算,在程序实现上十分麻烦,而且也会影响系统响应的速度。从我们研究太阳能电池的输出I-V特性曲线可以看到,在短路电流点附近,电池板接近恒流,输出I-V曲线在这一段接近一条直线;在开路电压点附近,电池板接近恒压,输出I-V曲线在这一段也接近一条直线。所以我们用四条直线来对电池板输出I-V曲线进行拟合,如图3所示。
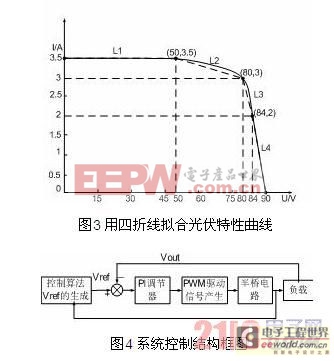
只要我们采集输出电压电流,得到负载电阻,其伏安特性曲线是一条通过原点的直线,这一直线与上面某一条直线必然交于一点,这一点就是我们系统的理想工作点。然后再根据这一点的电压和半桥公式就能得到系统需要发出的占空比。
4.2 PI控制算法在模拟器中的应用
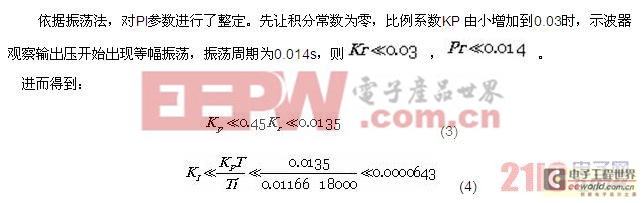
为了提高系统速度和减少静态误差,在控制系统中应用了PI控制算法,本设计的控制结构见图4。根据上文的控制策略,从测得的输出电压电流,可以得到输出负载RL,进而得到参考电压Vref,它与实际输出电压相减送入PI控制器中,PI输出控制调节占空比,进而使实际输出电压与Vref一致。
将上述得到的理论、代入程序中,运行测得输出几乎与理论值一致,偏差基本都在0.3V以内,证明了我们整定的参数是成功的。



评论