图1所示为电流跟踪波形的示意图,实线三角波表示ui无扰动时的iL波形、虚线三角波表示ui扰动时的iL波形。

图1 电流跟踪波形示意图
定义扰动后第j个开关周期为:
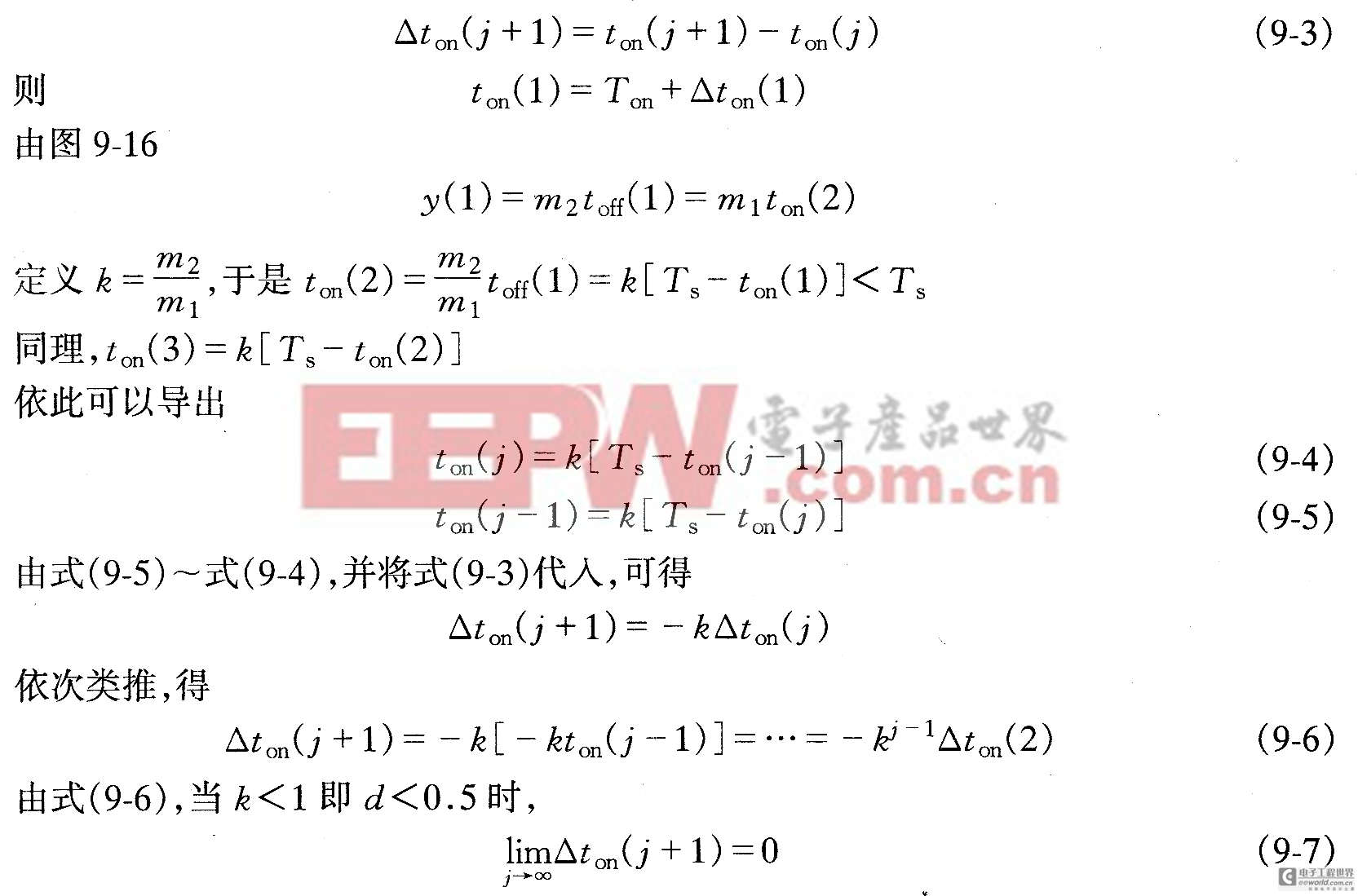
即系统是渐近稳定的。
反之,当k>1,即d>0.5时,式(9-7)不成立。但由于是周期性控制,式(9-4)~式(9-7)中的各个量总是小于开关周期Ts,并不会是无穷大,实际现象是导致开关频率降低,电流、电压纹波明显增大。
加斜坡函数补偿后,定义
 Mc为补偿锯齿波的斜率。
Mc为补偿锯齿波的斜率。
同理可以证明

因此只要k'1,即
式(9-7)仍然成立。也就是说,在适当的斜坡函数补偿的条件下,即使Du>0.5系统也可以渐近稳定。





评论