新能源最给力:实时内核的电动车电子差速仿真

引言
本文引用地址:https://www.eepw.com.cn/article/226566.htm伴随着日益严重的大气污染和能源危机,传统的交通工具——汽车的发展面临着一系列的挑战。传统的内燃机汽车消耗大量的石油资源,严重污染环境。这些无法避免的缺点使人们意识到,以清洁能源为动力的新一代汽车替代传统汽车的重要性,其中的电动汽车技术已经成为当今汽车领域的前沿课题之一。电动汽车具有零排放,低噪声,轻便,操控性能好等特点。此外随着电动轮技术和现场总线技术的发展,在电动车上更容易实现四轮独立驱动控制,进而为刹车防抱死系统(ABS)、电子稳定系统(ESP)等主动安全系统的实现提供便利。本文介绍一种基于嵌入式实时内核ARTXl66的电子差速算法。
1 基于Ackermann转向模型的四轮速度关系
根据汽车动力学分析可知,车辆转弯行驶时,汽车外侧车轮的行程要比内侧的长。如果通过一根整轴将左右车轮连接在一起,则会由于左右车轮转速虽相等但行程不同而引起一侧车轮产生滑转或滑移,不仅使轮胎过早磨损,无益地消耗功率,并且易使汽车在转向时失去抗侧滑的能力而使稳定性变坏,操控性变差。为避免上述情况的出现,实现车辆的平顺转向,一般要求所有车轮在转向过程中都做纯滚动。对四轮独立驱动电动车而言,即要求四个车轮在转向过程中具有各自不同的转速,并且各车轮的转速应满足一定的关系。该关系为设计汽车差速系统的主要依据。低速情况下,这一特定关系可由Ackermann模型推导得出。
使用Ackermann转向模型进行转向时,分析四轮速度关系的假设前提条件为:
①刚性车体;
②车轮作纯滚动,即不考虑已发生滑移、滑转;
③行驶时所有轮胎都未离开地面;
④轮胎侧向变形与侧向力成正比。
该转向模型如图1所示。
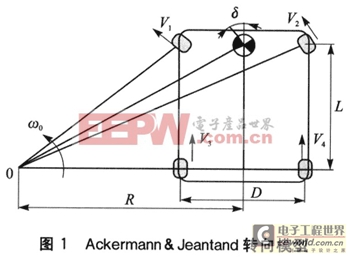
其中,轴距L和两侧轴线距离D是常数值,δ是方向盘的转角,ω0为车绕转向瞬心的角速度,V1、V2、V3、V4是4个转动轮的速度。由图1可得:

需要注意的是,对于4个执行机构BLDC来说,所需要的输入信号是角速度值ωx。它与V的关系是:

r是轮子的半径。
在本实验系统中,将加速手把的转速设定值ωr(参考角速度)定义为与最大速轮的转速,即左转时,右前轮角速度为ωr;右转时,左前轮角速度为ωr(也可另行定义)。
很显然,如果在程序中直接套用上面的公式,则运算量将非常大,运算时间也会很长;但可以看出,只要方向盘的转角δ定,则4个轮子的转速与参考角速度的比值 ω1/ωr、ω2/ωr、ω3/ωr、ω4/ωr是唯一确定的。所以在程序运行当中,完全可以预先将0。到最大转向角问分成若干等份,再将不同的δ值对应的4个速度比率列成表格,用查表与内插值的方法简化运算的过程。
值得一提的是,上述的算法可以在Matlab/Simulink中搭建模型,它将使表格的查询与线性内插值的处理变得十分方便。整个算法模型完成之后,还可以利用Matlab的自动代码生成功能,直接生成C语言代码,嵌入到控制系统当中去,这极大地缩短了系统开发的时间。2 XCl64CS微处理器
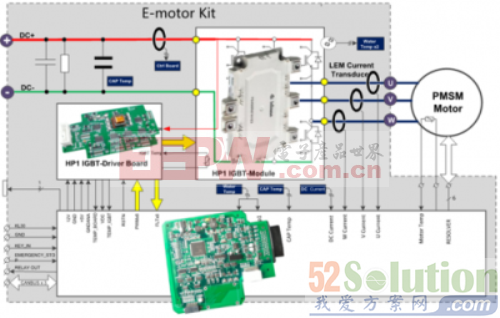
对于四轮驱动电动车的控制应用,要求微处理器提供系统安全和故障保险机制,以及有效的措施以降低器件的功耗,并且具有强大的运算能力与稳定性能,同时保证系统具有足够用于整车系统进一步改进与升级所需的资源。为此,选用了Infineon公司的高性能16位微控制器XCl64CS。
XCl64内核结构结合了RISC和CISC处理器的优点,这种强大的计算和控制能力通过MAC单元的DSP功能实现。XCl64把功能强劲的CPU内核和一整套强大的外设单元集成于一块芯片上,并有效连接。同时,在XCl64上应用的LXBus是众多总线中的一条,是外部总线接口的内部代表。这个总线为XCl64的衍生产品集成附加的特殊应用外设提供标准途径。






评论