基于SPCE061A的智能轮椅避障控制系统设计
0 引 言
全世界人口老龄化进程正在加快,今后50年内,60岁以上的人口比例预计将会翻一番,由于各种灾难和疾病造成的残障人士也逐年增加,他们存在不同程度的能力丧失。如行走、视力、动手及语言等。为了给老年人和残障人士提供性能优越的代步工具,帮助他们提高行动自由度及重新融人社会,将智能机器人技术应用于电动轮椅的智能轮椅被提了出来。智能轮椅又称轮椅式移动机器人。可以灵活避障是轮椅智能化的一个重要体现。
避障就是指机器人根据获得的障碍物信息,做出相应的避障决策。本课题采用超声波传感器获取机器人外部障碍物信息,再把障碍物信息传给上位机,由上位机根据得到的障碍物信息做出相应的避障决策。
1 智能轮椅自主避障硬件设计
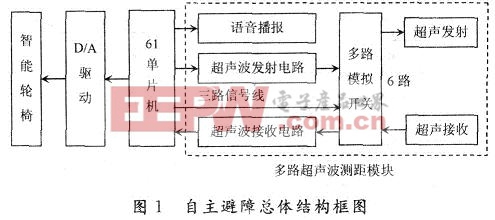
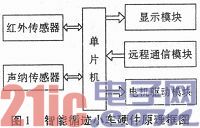
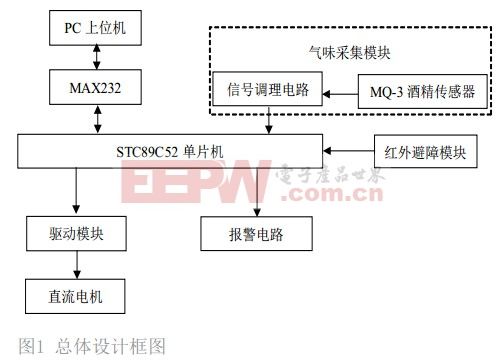
智能轮椅自主避障系统的硬件结构主要包括多路超声波测距模块、微处理器模块、D/A驱动模块、电源模块,如图1所示。
1.1 多路超声波测距模块
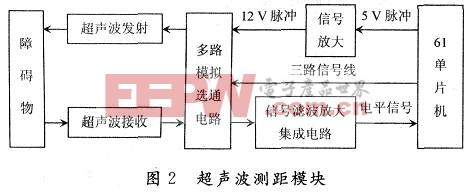
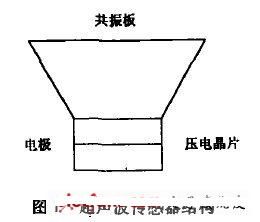
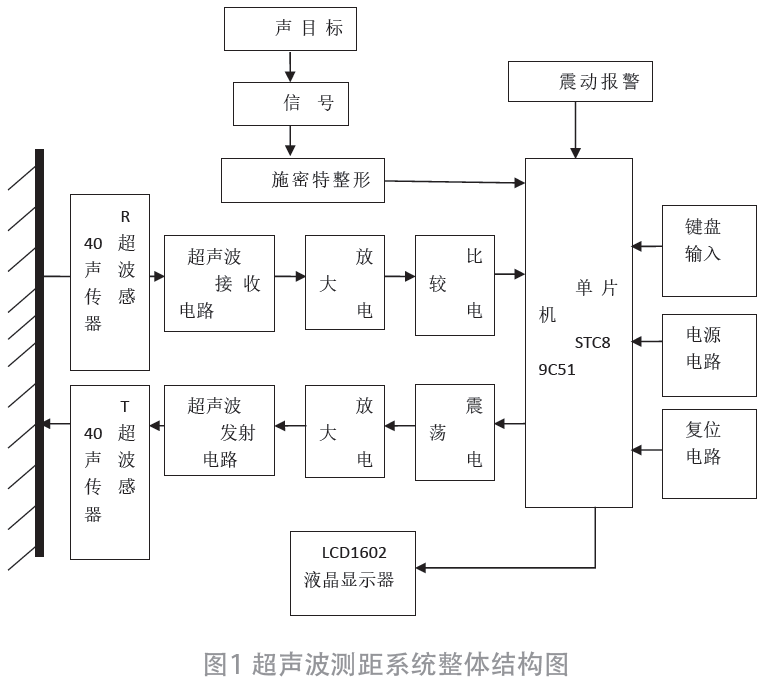
本智能轮椅自主避障系统采用超声波传感器测量障碍物的距离,工作时,由61单片机通过三路信号线选通多路模拟开关,由多路模拟开关负责每一路超声波传感器的通断。每一路超声波传感器工作时,都由61单片机的IOB9口发射出频率为40 kHz,幅值为5 V的矩形脉冲信号,经过信号放大电路,变成稳定的12 V矩形脉冲信号,由超声波发射换能器发射出超声波。超声波遇到障碍物返回,由超声波接收换能器接收,经过信号滤波放大集成电路,触发61单片机中断。由61单片机计算渡越时间,从而计算出障碍物的距离,总体结构框图如图2所示。
1.2 微处理器模块
选用台湾凌阳16位单片机SPCE061A作为系统的核心,SPCE061A主要包括通用I/O端口、定时器/计数器、A/D转换器、D/A转换器、串行设备输入输出、通用异步串行接口、低电压监测和低电压复位等部分,并且内置了在线仿真电路ICE接口,SPCE061A具有体积小、集成度高、可靠性好且易于扩展,较强的中断处理能力,高性能价格比,功能强、效率高的指令系统,低功耗、低电压等特点。采用SPCE061A作为机器人系统的核心部件,由61单片机处理障碍物数据信息,并根据数据信息做出相应的避障决策。使智能轮椅灵活避障。
1.3 D/A驱动模块
系统采用直流永磁电动机DG一168A左右配对分别来驱动轮椅左右轮,左、右配对使用DG一168系列具有机械性能好、过载能力大、平衡性好、调速性宽阔平滑、噪音低之优点。DG一168A电机功率为168W,使用电压为24 V。买回来的电动轮椅本身自带手柄控制,经研究发现,手柄部分共六条线,红、黑、黄、褐、兰、白,输出四路信号。黄、褐两路控制轮椅前进后退;兰、白两路控制轮椅左转右转(如表1所示)。每两路的电压加起来要等于5V,当黄线电冶高于褐线电压时,轮椅前进;反之轮椅后退,同理,兰线电压高于白线电压时右转;反之左转。
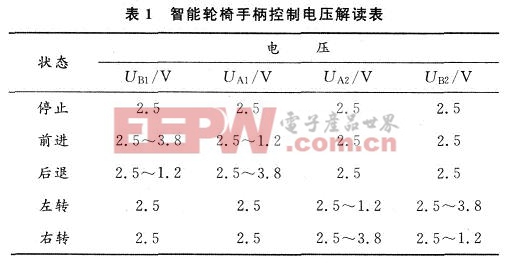
本课题的D/A模拟电路的B1,A1,A2,B2的电压输出分别代替了黄、褐、兰、白四条线的电压输出。所以通过两个D/A转换器TLV5618的输出,代替了手柄控制,具体转换电路如图3所示。
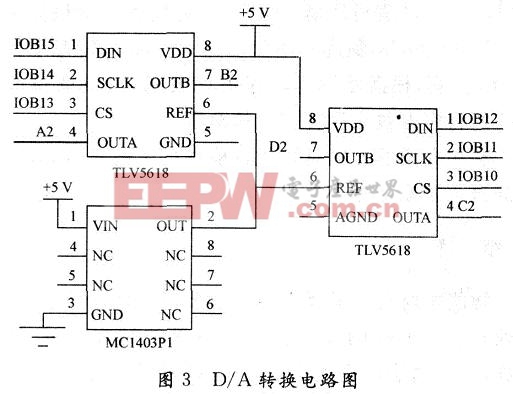
TLV5618与凌阳61单片机的3个I/0口相连,分别是数据串口DIN、时钟信号SCLK、片选信号CS。MC1403只有3只脚有效,VDD,VSS及供给DA 2.5 V的参考电压。
1.4 电源模块
电路驱动模块中用到了24 V,12 V,5 V三种电源,选用24 V,24 Ah的高能充电蓄电池作为动力能源,它为电机直接提供24 V工作电压,12 V,5 V分别通过7812,7805芯片由24 V转换得到。
2 智能轮椅自主避障软件设计
系统软件是在61单片机集成开发环境IDE2.O.O上开发的,该集成开发环境集程序的编辑、编译、链接、调试以及仿真等功能为一体,具有友好的交互界面,使用户的编程、调试工作更加方便且高效。
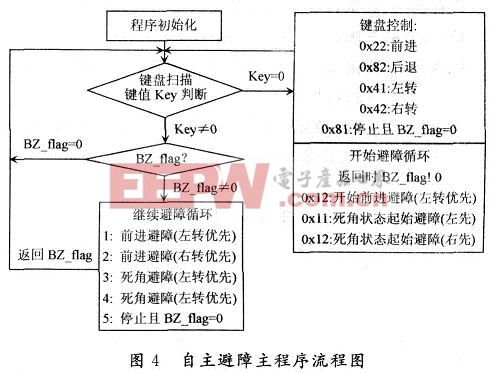
主程序设计如下:
主程序主要是通过扫描键盘,等候用户指令,不在避障状态下扫描等候,而进入避障状态后会根据探测到的环境选择相应的避障策略。在避障过程中若用户按下停止键则退出避障循环,主程序采用键盘扫描,节约了61单片机的中断资源,同时也减小了对测距的干扰,增加了智能轮椅实时避障的灵敏度。主程序流程图如图4所示。
3 实验结果分析
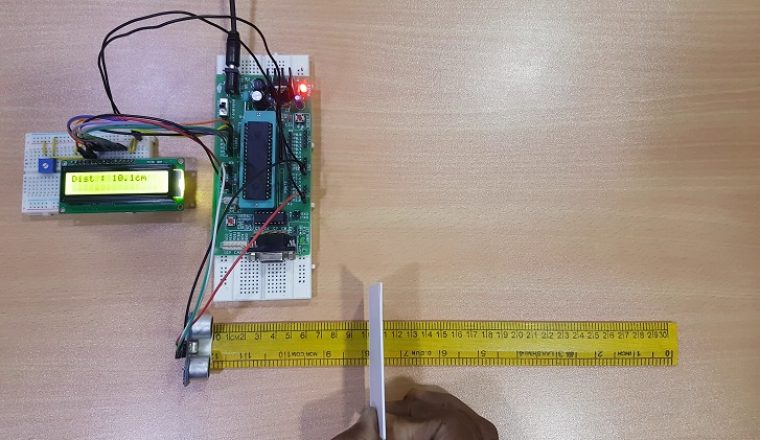
选用实验室外空旷环境作为轮椅运动的测试环境,对轮椅的运动进行反复测试可知,轮椅的运动最低平均速度为16 cm/s,最高平均速度为41 cm/s;转弯半径为50 cm左右,根据使用者对速度的要求,可以通过改变系统的特定参数来设置速度的范围。
利用介绍的方法对智能轮椅做自主避障实验,智能轮椅自主避障良好。
4 结 语
智能轮椅自主避障具有很重要的实用价值,本文设计的基于SPCE061A的自主避障系统结构简单,性价比高,易于功能扩展和移植。系统测试结果表明该系统基本达到实用化要求。




评论