基于单片机的智能循迹小车的硬件设计
3.3 电机驱动模块
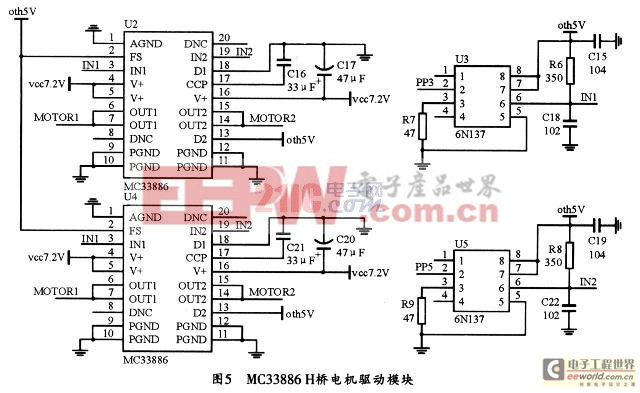
驱动电机控制选用MC33886 H桥电机驱动芯片,其整个驱动电路如图5所示。在此应用中,MC33886的作用是将恒定的直流电源电压(电池电压)调制成频率一定、宽度可变的PWM脉冲电压序列,从而改变输出平均电压的大小。为了增强驱动电机的能力,可将两片MC33886并联。而为了提高控制精度,则可将MC9S12XSl28单片机内部的PWM2和PWM3两个通道8位寄存器级联成16位寄存器,并从PWM3通道输出脉冲。同理。可将PWM4和PWM5两个通道8位寄存器也级联成16位寄存器,也从PWM5通道输出脉冲,PWM2和PWM3通道与引脚PP3和PP5复用,MC9S12XSl28单片机的PP3和PP5引脚输出的PWM脉冲经器件6N137光耦隔离后,通过信号INl和IN2进入MC33886 H桥输入端,MC33886 H桥输出端OUTl和OUT2分别接电机电枢两端,从而控制电机的四象限运行。
3.4 车速检测模块
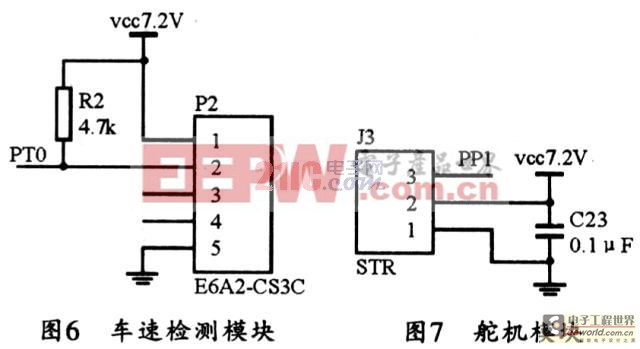
为了构成闭环系统,需要检测小车速度。本系统中的反馈通道中采用了欧姆龙公司的增量型旋转编码器E6A2CS3C,并采用五线制(三根脉冲线,2根电源线),分辨率为200P/R。由于只测量车速,故只需3线,即棕色线(7.2 V电压)、黑色线(A相输出脉冲)和蓝色线(接地),其中黑色线(A相输出脉冲)引入单片机PT0引脚,以统计脉冲个数,获取电机速度。车速检测模块的接线如图6所示。
3.5 舵机模块
本设计采用的是Futaba S3010型号的舵机,其接线如图7所示。该舵机实质上是一个位置随动系统,它由舵盘、减速齿轮组、位置反馈电位计、直流电机和控制电路组成,通过内部位置反馈,可使它的舵盘输出转角正比于给定控制信号,这样,在负载力矩小于其最大输出力矩的情况下,它的输出转角就会正比于给定的脉冲宽度。Futaba S3010型号舵机的接口是三根线,黑线(接地)、红线(电源线)和白色线(控制信号线)。为了提高舵机的响应速度,一般选择最大的工作电压7.2 V,并将单片机内部PWM0和PWMl两路8位输出级联成一个16位PWM输出,然后从PWMl通道输出脉冲。同时由于PWMl通道和引脚PPl复用,因此,引脚PPl便可输出控制脉冲给舵机。
4 结束语
本文介绍了黑线循迹智能车的硬件系统实现方法,实践证明,该车自动循迹效果好,响应速度快,在规定的赛道上能跑出20秒的好成绩,从而证明了该系统硬件设计的正确性。














评论