基于单片机的智能循迹小车的硬件设计
3 外围接口和驱动电路板设计
3.1 电源管理模块
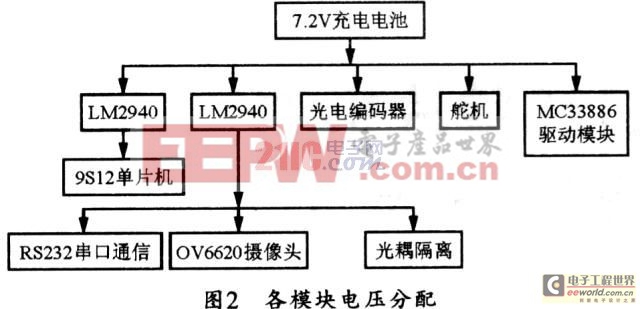
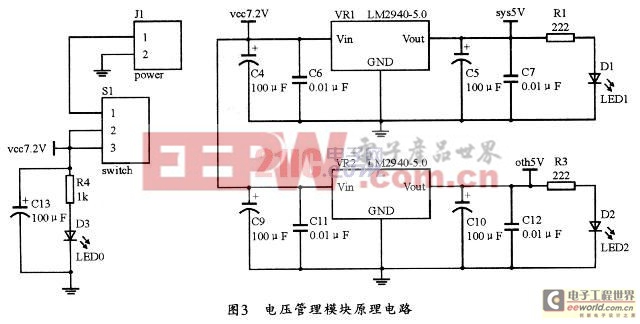
整个系统中各模块的电压分配如图2所示。其中充电电池的7.2 V电压经LM2940-5.0模块转换后,可产生5 V电压分别供给MC9S12XSl28单片机和RS232电平转换芯片、OV6620摄像头模块和光电耦合器件6N137,同时给核心控制器的MC9S12XSl28单片机单独进行5 V供电以防干扰。单片机和MC33886电机驱动模块之间则通过光电耦合器件进行连接。电池的7.2 V电压则直接供给E6A2CS3C光电编码器、舵机和MC33886驱动模块。其电源管理模块电路如图3所示。
3.2 OV6620图像采集模块
OV6620摄像头模块采用OV6620彩色数字CMOS图像传感器,其图像是NAL制,一帧图像为356x292像素,数据格式为YCrCb4:2:2,GRB4:2:2和raw GRB。内部的I2C可编程用来调整摄像头的参数(如最大灰度、对比度、曝光率控制等),其本质是SCCB协议的寄存器写入。本设计采用默认模式,OV6620摄像头模块和MC9S12XSl28单片机的引脚连接图如图4所示。其中:Y0-Y7为灰度信号输出引脚。由于本系统只需识别道路中黑线,故只需提取数据格式为YCrCb4:2:2中的亮度信号Y。灰度信号Y0-Y7则可送给MC9S12XSl28单片机的B口。

SCCB协议写入的数据信号引脚SDA和数据时钟引脚SCL分别连接MC9S12XSl28单片机的SCI接口的PS0、PSl引脚。
采集图像数据的时钟控制信号FODD(奇偶场同步信号)、HREF(行中断信号)、VSYN(场中断信号)分别接单片机中ECT。(增强型捕捉定时器)模块中的PTl、PT2、PT6引脚。利用增强型捕捉定时器模块的输入捕捉功能,每个通道可以拥有单独的中断向量,各通道分别设置成不同的触发极性,以满足HREF(行中断信号)要通过下降沿捕捉及VSYN(场中断信号)要通过上升沿捕捉的要求。像素同步信号PCLK被忽略的原因是因为MC9S12XSl28单片机采集图像的速度比CMOS的图像输出慢。
通过VTO模拟图像输出引脚可以外接监视器来查看采集图像的质量。














评论