基于PAX270+EP2C20的真空冻干控制系统设计

随着科技的发展,由于触摸屏和PLC控制系统不易实现功能扩展、升级困难、操作界面不够丰富等原因,已经不能完全满足企业的需要,市场需要开发出更加先进的冻干设备控制系统。2007年1月上海远东制药机械总厂开发完成了目前国内最先进的嵌入式冻干控制系统。
控制系统根据冻干技术对冻干机控制系统的新要求而设计,采用高性能的Xscale内核嵌入式微处理器,结合FPGA完成集散控制(DCS),该系统有稳定可靠的工作性能、强大的扩展功能、友善的界面,从而具有更强的竞争力。
1 系统硬件结构设计
该控制系统主要由嵌入式微控制器和现场可编程门阵列(FPGA)器件、温度调节模块、真空度调节模块、GSM模块、本地和网络PC、LCD控制、各种传感器、打印机及检测、控制模块组成,如图1所示。
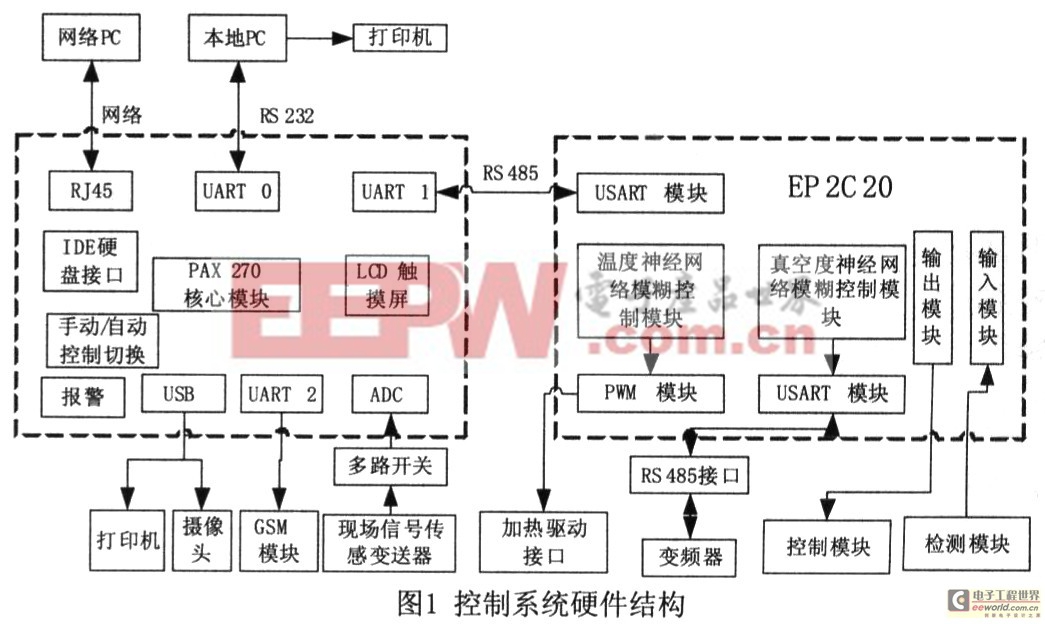
控制系统的核心由ARM及FPGA器件组成,实现整个系统的通信、现场显示、现场控制等功能,同时实现温度、真空度的神经网络控制。
检测量模块主要由传感器、信号调整及采集等组成,实现温度、真空度、湿度以及各主要部件(热继电器、交流接触器位置等)的状态的测量。控制模块主要由光隔离、驱动及执行机构组成,实现气阀、水阀、电动机、变频器、加热器等的驱动与控制。LCD触摸屏、IDE硬盘、打印机协调工作以实现冻干工艺曲线的实时采集、显示、输出与数据存储,还有冻干机温度与真空度参数的设置与控制等功能。
GSM模块实现工业现场的无线监测,本地PC可用于远程控制,网络PC可扩展为正在兴起的网络控制。嵌入式微处理器的选择。由于该真空干燥系统要进行大量的数据运算,需要较强的控制能力,需要有较多的USART接口,同时要有ADC转换功能、LCD触摸屏、USB口等,在微处理器选择上,普通的8位、16位单片机已难以胜任,因此32位的嵌入式微处理器是比较好的选择。本系统选择INTEL PAX270,是一款基于32位Xscale核心的高性能、工业级的32位RISC微控制器,它具有极低的功耗,LCD控制器(最大支持64K色STN和1256K色TFT)提供1通道LCD专用DMA,8通道10比特ADC和触摸屏接口,3通道UART(IrDA1.0,16字节TxFIFO,和16字节RX FIFO)/2通道SPI,2端口USB主机/1端口USB设备(1.1版),PWM通道(4路输出),以及多达119个中断源,这款微控制器特别适合自动化应用,并适用于工业控制、医疗系统、访问控制和故障维护等应用领域。
FPGA器件的选择。由于该系统包括了神经网络的实现,需要大量RAM空间来保存中间参数和查表计算,同时还需要大量的通用I/O接口,用于输入输出模块以及快速响应精确的PWM调制功能,因此用FPGA是比较好的选择。这里选择Altera公司推出的低成本Cyclone系列,型号为EP2C20。EP2C20内部有18752i逻辑单元,52个M4K RAM块,共计239K位RAM,26个嵌入式18*18乘法器,4个锁相环,资源非常丰富,可满足系统设计要求。
2 温度与真空度控制模型
2.1 恒温或按某预定温度曲线的控制模型
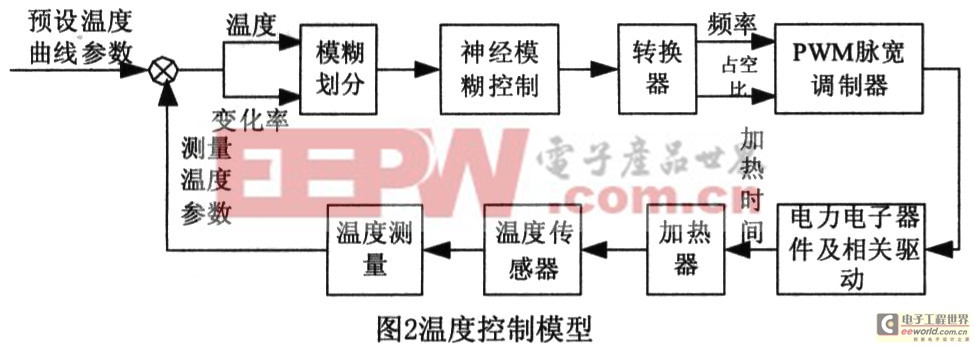
温度控制模型如图2所示。温度控制采用神经网络模糊控制模型,设定值和测定值经过模糊划分后,同时送入神经模糊控制网络,生成模糊控制子集,通过转化器产生。PWM脉宽调制用的频率值与占空比,然后生成PWM驱动信号,驱动电力电子器件,电源输出给红外石英管,对真空箱进行加热。通过温度传感器及调整电路,形成温度值和温度变化率,根据温度值和温度变化率控制器对输出频率和占空比进行调整。
2.2 恒真空度或按某预定真空曲线的控制模型
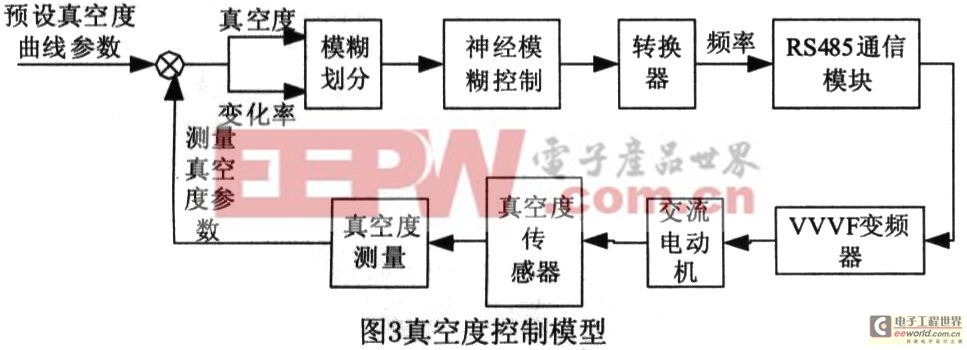
真空度的控制模型与上述温度控制模型结构相似,不同的是神经模糊控制网络的输出不是直接用于电机的控制驱动,而是把输出的频率量转换成变频器的远程控制信号,通过RS485接口控制变频器的启动、停止和频率设置,如图3所示。
2.3 神经网络选择与仿真
根据上述控制模型,比较成熟的BP网络选择的控制神经网络如图4所示。神经模糊控制器在输入/输出参量的选择,以及模糊论域和模糊子集的确定方面,与一般的模糊控制器没有什么区别,只是在推理手段上引入了神经网络。
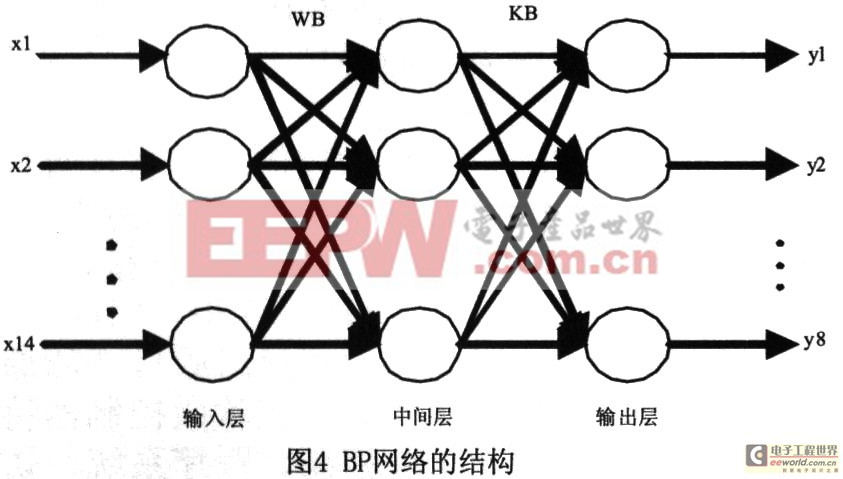
以真空度控制为例来验证控制模型的精确程度。令x1~x7为输入真空度的模糊子集,x8~x14为输入真空度变化的模糊子集,y1~y8为输出空置量的模糊子集,从表1可以看出,共有16条控制规则。例如,当真空度为"合适",变化率为"零"时,抽空时间应该为"短",这个样本可以表示为:
![]()

其中,x中的各元素为对应的隶属函数,及模糊自己的赋值。同理可得其他15个样本,并将它们依次送入神经网络训练,当训练结束后,神经网络已经记忆了模糊控制规则,使用时具有联想记忆功能。如图表2所示,为每一个输入参量的模糊量。

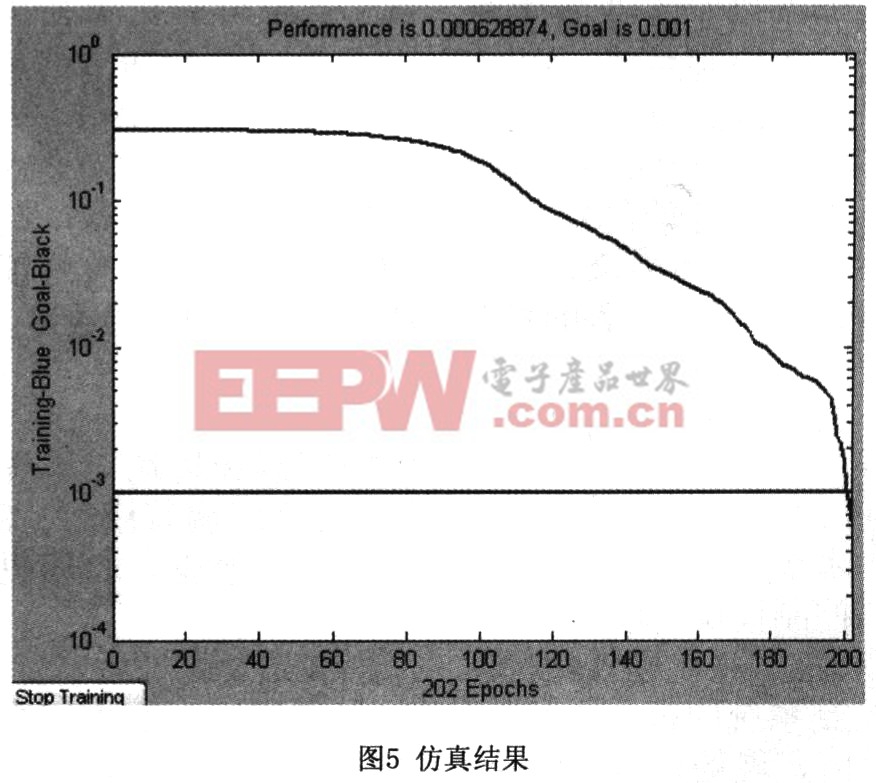
根据模糊规则,可得到神经网络的训练样本,本次训练假设目标误差为0.001,训练步数为1000次,仿真结果如图5所示,可以看出,在训练到202次后目标误差达到要求。
3 总结
本系统采用了ARM与FPGA的双核处理器,与现在常用的PLC控制相比,大幅提高了系统功能及运算速度,采用FPGA的可重构计算技术,可实现动态系统的更新与升级,及远程系统的更新与维护。

评论