PC与单片机的串行通信及数据处理

引言
Matlab是由美国Mathworks公司开发的面向理论分析研究、工程计算数据处理和缓图的一套具有强大功能的软件系统。其中Matlab语言是一种以矩阵为基本运算单元的解释执行的高级语言,编程简例,只要几条语句就能实现诸如FFT变换、FIR/IIR滤波等数据分析处理,易于掌握。从Matlab6.0版本开始,Mathworks公司在软件中增加了设备控制箱(instrument control toolbox),提供了对RS-232/RS-485通信标准的串口通信的正式支持。利用该工具箱的serial类及instrcallback()回调函数,能可靠地进行实时串地通信。为此,笔者充分结合单片机和Matlab的优点,基于事件驱动的中断通信机制,提出了一种Matlab环境下PC机与单片机实时串行通信的数据处理方法,极大地简化开发流程,提高了系统开发效率。另外,与目前普遍采用的基于Matlab查询方式下的非实时串行通信技术相比,这种方法的实用性也大大增强了。
1 系统总体设计简介
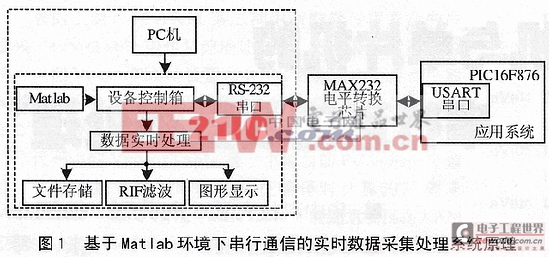
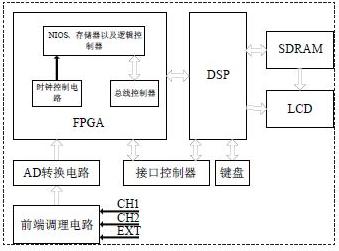
下面以Mircochip公司的PIC16F876单片机为下位机,PC机为上位机组成的实时数据采集处理系统为例,介绍基于Matlab环境下PC机与单片机串行通信的实时数据处理方法的实现。数据采集系统的结构框图如图1所示。PC机串口与单片机USART口通过MAX232电平转换芯片相连,系统工作时,Matlab通过调用设备控制工具箱中的serial类及相关函数。来创建串口设备对象,得到设备的文件句柄,从而以操作文件的方式实现对PC机串行口的读写操作。因而PC机可以通过Matlab向串行口发送特殊指令,PIC单片机应用系统对此作出相应的反应,将A/D采样数据通过串行口回送给PC机。此时,Matlab通过中断的方式,实时接收单片机发送的数据,并完成对数据的分析处理、文件存储、FIR滤波及图形显示。
2 PIC16F876与PC机串行通信接口的设计
2.1 PIC16F876单片机串行通信接口的硬件设计
PIC16F876微处理器芯片内部集成了一个串行通信(SCI)模块。该模块是一个通用的同步/异步收发(USART)通信接口。
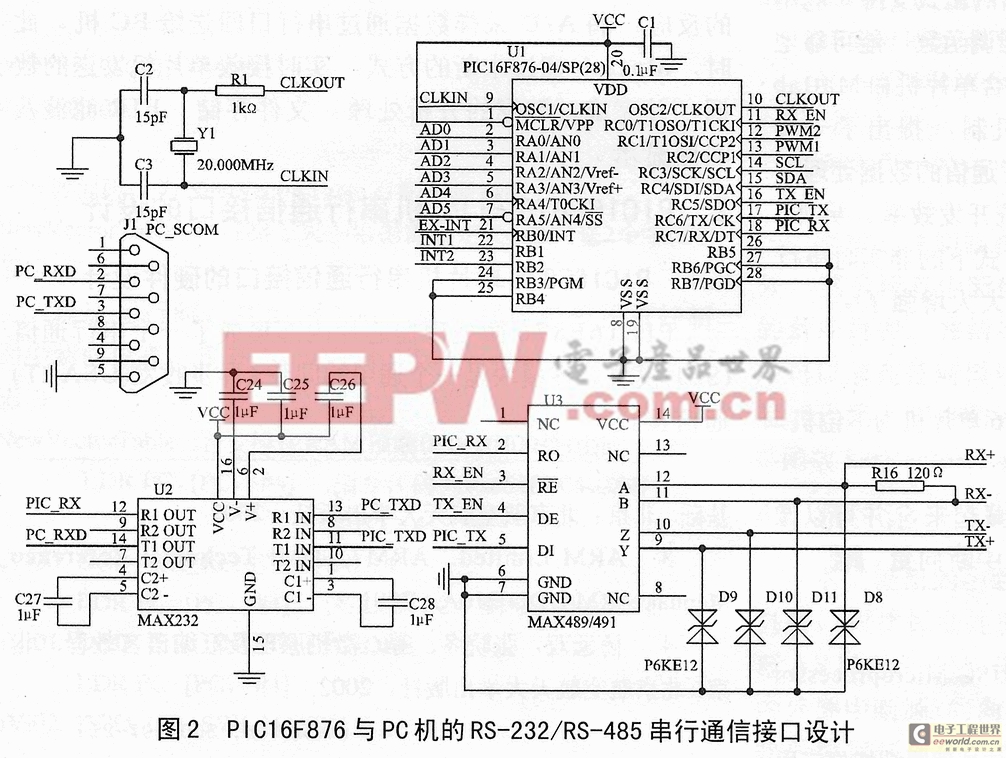
PIC16F876的SCI通信接口有两个外部引脚——RC6/TX(SCI发送输出引脚)和RC7/RX(SCI接收输入引脚),引脚的信号电平为TTL类型;而PC机串口的异步串行通信基于RS232标准。两者通信信号的逻辑电平不一致,必须进行信号电平转换。为此,在电路中选用Maxim公司的MAX232芯片,以实现TTL电平与RS-232电平的双向转换。RS-232通信距离一般以不超过12m为宜,在工业控制现场很受限制。为保证硬件设计的兼容性和易扩展性,能够应用于不同场合,考虑到实际应用的需要,在硬件电路中还可选用一个MAX491芯片,添加了一个RS-485通信接口。
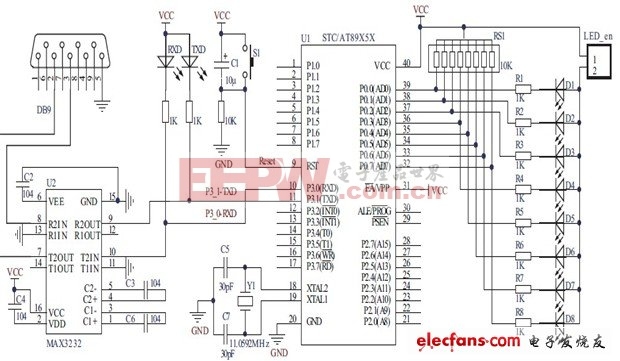
如图2所示,实际使用过程中,系统可以根据需要,灵活使用不同的通信标准,十分方便。当PIC单片机SCI通信接口引脚直接通过MAX232芯片与PC机串口相连时,系统采用RS-232的通信标准;当PIC单片机SCI通信接口口引脚与MAX489芯片的DI、RO引脚相连时,系统采用RS-485的通信标准。另外,还可通过PIC单片机控制MAX489芯片的DE、RE引脚,随时使能或屏蔽掉MAX489的数据接收和数据发送功能。
2.2 PIC16F876与PC机串行通信接口的软件设计
本通信系统中规定的字符格式为:每一帧的数据占10位——1位起始位,8位数据位,1位停止位,无奇偶校验位。中间的8位数据位即为有效的通信传输字节。双方的波特率设置为115.2kb/s,以较高速度进行通信。同时,为了增强通信的可靠性、减少通信的误码率,在通信过程中约定了双方的软件握手方法。为了不致使通信过于复杂,提高通信速度,可以直接将握手信号0xFF嵌入到数据包中。软件握手协议规定如下:PC机发送符合握手信号0xFF给单片机,PIC单片机接收到的上位机数据若为握手信号0xFF,则回送两次A/D采样数据包,并将握手信号0xFF嵌入到数据包作为第一个数据,两次发送数据的时间间隔为5ms;单片机接收到的上位机数据若不是握手信号,则继续等待。若PC机接收到的数据包的第1个字节不是0xFF,则屏弃该数据包;若是,则表示握手成功,经校验正确后将该数据包直接存储接收,并从中分解有效的A/D采样数据信息。
[next]
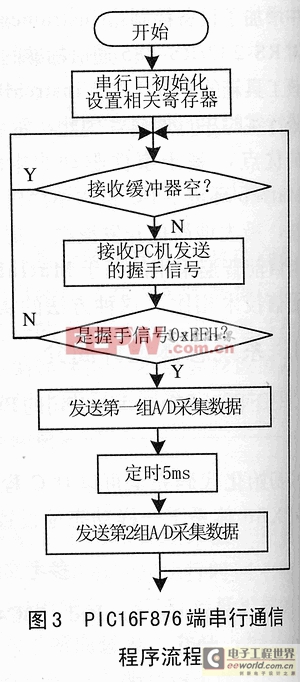
PIC16F876端串行通信的C语言程序流程如图3所示,相应的主要通信源代码如下:
//串口相关寄存器的初始化子程序void sci_initial(){SPBRG=0C0A; //设置通信波特率为115.2kb/sTXSTA=0X04; //选择异步高速通信模式RCSTA=0x80; //串行口使能,接收数据长度为8位,无奇偶校验TRISC6=0; //RC6引脚设置为输出方式TRISC7=1; //PC7引脚设置为输入方式}//串口接收和发送数据子程序void sci_com(){while(!RCIF); //查询接收中断标志位,等待上位机发送的串口数据rec_data[0]=RCREG;//接收串口数据if(rec_data[0]==0xFF){send_data[0]=rec_data[0]; //在第1组数据中嵌入回送握手数据0xFFfor(j=0;j33;j++){TXREG=send_data[j]; //发送第1组32字节的A/D转换数据,包含握手信号0xFF为33个字节数据while(!TXIF); //查询发送标志位,等待数据发送完毕再进行下一次数据发送}delay_ms(5); //PIC单片机定时5ms发送第2组A/D转换数据send1_data[0]=rec_data[0]; //在第2组数据中嵌入回送握手数据0xFFfor(j=0;j33;j++){TXREG=send1_data[j];//发送第2组32个字节A/D转换数据及握手信号数据While(!TXIF); //查询发送标志位,等待数据发送完毕再进行下一次数据发送}}}3 Matlab环境下PC机与单片机的通信
在Matlab6.0中新增的设备控制工具条(instrument control toolbox)用来负责上、下位机之间的通信。该设备控制工具箱的特色如下:
①支持基于串行接口(RS-232、RS-422、RS-485)、GPIB总线(IEEE2488、HPIB标准)、VISA总线的通信;
②通信数据支持二进制和文本(ASCII)两种方式,文本方式支持SCPI(Standard Commands for Programmable Instruments)语言;
③支持异步通信和同步通信;
④支持基于事件驱动的通信。
从以上的Matlab设备控制工具箱的特点可以看到,Matlab完全可以满足我们实现串行通信的要求。
3.1 Matlab对串行口控制的基础知识
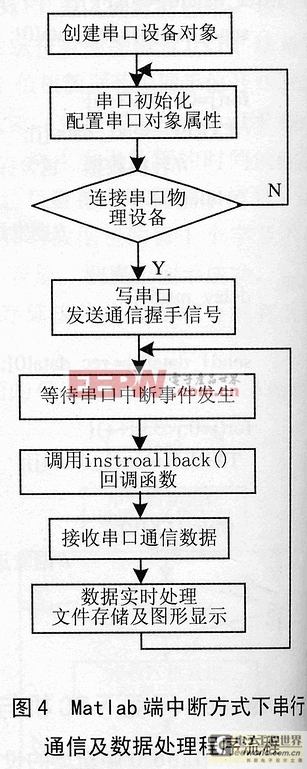
Matlab对串行口的编程控制主要分为四个步骤。
①创建串口设备对象并设置其属性。
scom=serial('com1');%创建串口1的设备对象scom
scom.Terminator='CR';%设置终止符为CR(回车符),缺省为LF(换行符)
scom.InputBufferSize=1024;%输入缓冲区为256B,缺省值为512B
scom.OutputBufferSize=1024;%输出缓冲区为256B,缺省值为512B
scom.Timeout=0.5;%Y设置一次读或写操作的最大完成时间为0.5s,缺省值为10s
s.ReadAsyncMode='continuous'(缺省方式);%在异步通信模式方式下,读取串口数据采用连续接收数据(continuous)的缺省方式,那么下位机返回的数据会自动地存入输入缓冲区中.
注意:在些属性只有在对象没有被打开时才能改变其值,如InputBufferSize、OutputBufferSize属性等。对于一个RS-232/RS-422/RS-485串口设备对象,其属性的缺省值为波特率9 600b/s,异步方式,通信数据格式为8位数据位,无奇偶校验位,1位停止位。如果要设置的串口设置对象的属性值与缺省值的属性值相同,用户可以不用另行设置。
另外,设置串口设置对象的属性也可以用一条指令完成,如:scom=serial('COM1','BaudRate',38400,'Parity','none','DataBits',8,'StopBits',1)。也可以用set命令,如set(scom,'BaudRate',19200,'Parity','even')。创建了对象后可以在Matlab命令窗口直接敲对象名并回车,看到其基本属性和当前状态。若需要知道其全部的属性,可以用get(scom)命令。
②打开串口设备对象。
fopen(scom);
③读写串口操作。初始化并打开串口调协对象之后,现在可以对串口设备对象进行读写操作,串口的读写操作支持二进制和文本(ASCII)两种方式。当Matlab通信数据采用西方(ASCII)方式时,读写串口设备的命令分别是fscanf、fpritf;当Matlab通信数据采用二进制方式时,读写串口设备的命令分别是fread、fwrite。下面以文本方式读写串口为例:
a.读串口。A=fscanf(scom,'%d',[10,100];%从串口设备对象scom中读入10*100个数据填充到数组A[10,100]中,并以整型的数据格式存放。

单片机相关文章:单片机教程
单片机相关文章:单片机视频教程
单片机相关文章:单片机工作原理
数字通信相关文章:数字通信原理
通信相关文章:通信原理

评论