基于89C55和GAL16V8,MC1413的步进电机驱动器的设计

引言
步进电机广泛应用于对精度要求比较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门控制器等。目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。分散器件组成的环形脉冲分配器体积比较大,同时由于分散器件的延时,其可靠性大大降低;软件环形分配器要占用主机的运行时间,降低了速度;专用集成芯片环形脉冲分配器集成度高、可靠性好,但其适应性受到限制,同时开发周期长、需求费用较高。
89C55和GAL16V8
89C55是Atmel公司的低电压,高性能CMOS 8 位单片机,片内含20k bytes的可反复擦写的Flash只读程序存储器和256 bytes的随机存取数据存储器(RAM),器件采用Atmel公司的高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,引脚兼容工业标准 89C51和89C52芯片,采用通用编程方式,片内置通用8位中央处理器和Flash存储单元,内置功能强大的微处理器的AT89C55可提供许多高性价比的解决方案,适用于多数嵌入式应用系统。
通用阵列逻辑GAL是美国Lattice公司研制的一种电可擦除的可编程的新型PLD器件。近几年来,GAL以其高性能、高可靠性、可擦除及输出逻辑结构可组态等特性和100%的成品率,博得广大用户的信赖。它可以用来构成译码器、优先级编码器、多路开关、比较器、移位寄存器、计数器、总线仲裁器等。采用GAL16V8器件对两相和四相混和式步进电机进行控制,不仅简化了系统的结构,降低了成本,而且编程灵活方便,提高了系统的可靠性,使系统具有更强的适应性。
硬件设计
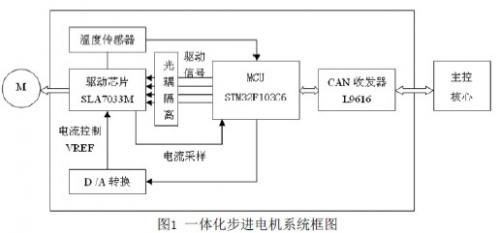
本设计选用GALl6V8为环形脉冲分配器和MC1413(国产型号为5G1413)七路达林顿驱动器阵列。最大驱动电流可以达到500mA.通常应用时是把负载步进电机的一端接到VDD(12V)上,另一端接到输出引脚上,如16脚。了防止程序进入死循环,增加了外部的硬件看门狗定时器MAX813L,其内部的看门狗定时器监控UP/UC的工作。如果在1.6s内未检测到其工作,内部的定时器将使看门狗输出WDO处于低电平状态,WDO将保持低电平直到在WDI检测到UP/UC的工作。将WR和WDO连接可使看门狗超时产生复位。具体硬件电路如图1所示。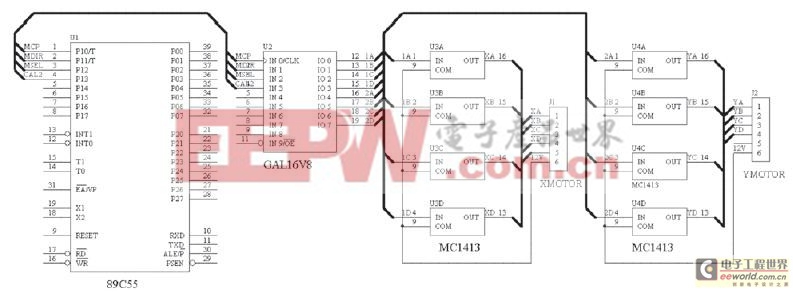
软件设计
通常,步进电机的脉冲控制是由逻辑电路实现的。在计算机控制的系统中,也可以通过编制程序,由扩展I/O口输出脉冲来决定电机的运行方式、方向及转速。这种方式电路简单、控制灵活,但占用CPU的时间过多,每次驱动电机时,PC机都得被占用。GAL器件有多种型号,根据设计的需要,同时从经济的角度考虑,选用GALl6V8来实现四相混和式步进电机进行控制。使用ABEL语言编程,原码如下:
module motor
title
Operation of the simulator on devices with
motor
DATA I/O Corp. 21 10 2002
FB1 device 'P16V8R';
D1,D2,D3,D4 pin 2,3,4,5;
F1,F2,F3,F4,F5,F6,F7,F8 pin
19,18,17,16,15,14,13,12;
equations
F8 = D1D2D3D4;
F7 = D1D2D3!D4;
F6 = D1D2!D3D4;
F5 = D1D2!D3!D4;
F4 = D1!D2D3D4;
F3 = D1!D2D3!D4;
F2 = D1!D2!D3D4;
F1 = D1!D2!D3!D4;
end motor。
设置软件陷阱
当程序进入到非程序区,只要在非程序区设置拦截措施,使程序进入陷阱,然后强迫程序回到初始状态。如对CPU的RST指令对应的字节码为 0FFH,如果不用的程序存储区预先写入0FFH,则当程序因干扰而“飞”到该区域执行代码时,就相当于执行1条RST指令,从而达到系统复位的目的。
程序流程图如图2。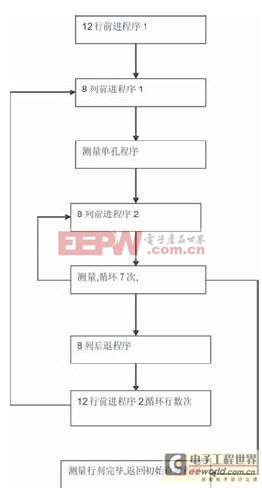
汇编原码如下:
MOV120: MOV R3,#51H
MOV121: LCALL MOV124 ;12
行前进程序1
DJNZ R3,MOV121
MOV P1,#0H ;电机矢电
MOV R0,#100
RD08: LCALLDELY
DJNZ R0,RD08
MOV80: MOV R3,#13H
MOV 2CH,#7 ;8列前进程
序1
MOV81: LCALL MOV84
DJNZ R3,MOV81
MOV P1,#0H ;电机矢电
MOVR0,#10H
RD09: LCALLDELY ;测量单
孔程序
DJNZR0,RD09
SETBET0; 开定时器0
LCALLCOTP ; 单孔测量程序
CLRET0;关定时器0
LCALLQUIT
INC2DH
LCALLD10MS ;延时1毫秒
LCALLD10MS ; 延时1毫秒
MOV85: MOV R4,#0CH ;8列前
进程序2
MOV83: LCALL MOV86
DJNZ R4, MOV83
MOV P1,#0H
MOV R0,#10H
RD03: LCALLDELY
DJNZR0,RD03
SETBET0;开定时器0
LCALLCOTP;单孔测量程序
CLR ET0 ;关定时器0
LCALLQUIT
INC2DH
LCALLD10MS;延时1毫秒
LCALLD10MS
DJNZ 2CH,MOV85 ;测量,循
环7次,
CJNE R7,#1,RD02 ;判断测量
是否完毕
POP07H
SETB P3.3 ;P3.3=1
high voltage = 450V
LCALL BK080 ;测量行列
完毕,返回初始位置程序
LCALL BK120
LCALL LOCKOFF
RD02: LCALLBK080 ;8列后
退程序
MOVR0,#250
RD0A: LCALLDELY
LCALL DELY
DJNZR0,RD0A
RD01: MOV R5,#0BH
MOV123: LCALL MOV125 ;12行
前进程序2
DJNZ R5,MOV123
MOV P1,#0H ;电机矢电
MOVA,R7
MOV2DH,#0
INC2EH
DJNZR7,MOV80 ;循环行数次
结语
采用此设计的步进电机驱动系统,运动平稳,速度快,控制精度高,该产品已应用于哈尔滨思创生物的单光子分析计数仪的驱动系统。

评论