电动小车的电机驱动及控制

一个电动小车整体的运行性能,首先取决于它的电池系统和电机驱动系统。 电动小车的驱动系统一般由控制器、功率变换器及电动机三个主要部分组成。电动小车的驱动不但要求电机驱动系统具有高转矩重量比、宽调速范围、高可靠性,而且电机的转矩-转速特性受电源功 率的影响,这就要求驱动具有尽可能宽的高效率区。我们所使用的电机一般为 直流电机,主要用到永磁直流电机、伺服电机及步进电机三种。直流电机的控制很简单,性能出众,直流电源也容易实现。本文即主要介绍这种直流电机的驱动及控制。
1.H 型桥式驱动电路
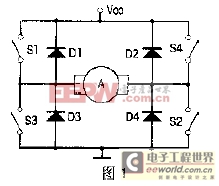
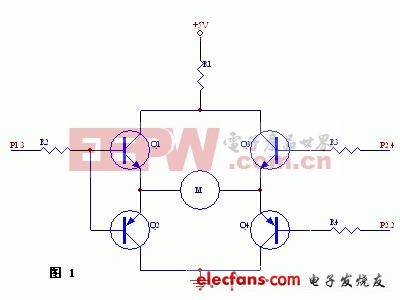
直流电机驱动电路使用最广泛的就是H型全桥式电路,这种驱动电路可以很方便实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动。 它的基本原理图如图1所示。
全桥式驱动电路的4只开关管都工作在斩波状态,S1、S2为一组,S3、S4 为另一组,两组的状态互补,一组导通则另一组必须关断。当S1、S2导通时,S3、 S4关断,电机两端加正向电压,可以实 现电机的正转或反转制动;当S3、S4导 通时,S1、S2关断,电机两端为反向电 压,电机反转或正转制动。
在小车动作的过程中,我们要不断地使电机在四个象限之间切换,即在正转和反转之间切换,也就是在S1、S2导 通且S3、S4关断,到S1、S2关断且S3、 S4导通,这两种状态之间转换。在这种情况下,理论上要求两组控制信号完全 互补,但是,由于实际的开关器件都存在 开通和关断时间,绝对的互补控制逻辑必然导致上下桥臂直通短路,比如在上 桥臂关断的过程中,下桥臂导通了。这个过程可用图2说明。
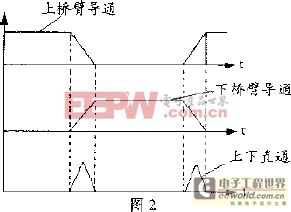
因此,为了避免直通 短路且保证各个开关管动作之间的协同 性和同步性,两组控制信号在理论上要 求互为倒相的逻辑关系,而实际上却必须相差一个足够的死区时间,这个矫正过程既可以通过硬件实现,即在上下桥 臂的两组控制信号之间增加延时,也可 以通过软件实现(具体方法参看后文)。
驱动电流不仅可以通过主开关管流通,而且还可以通过续流二极管流通。当电机处于制动状态时,电机便工作在发电状态,转子电流必须通过续流二极管流通,否则电机就会发热,严重时烧毁。
开关管的选择对驱动电路的影响很大,开关管的选择宜遵循以下原则:
(1)由于驱动电路是功率输出,要求开关管输出功率较大;
(2)开关管的开通 和关断时间应尽可能小;
(3)小车使用的电源电压不高,因此开关管的饱和压降应该尽量低。
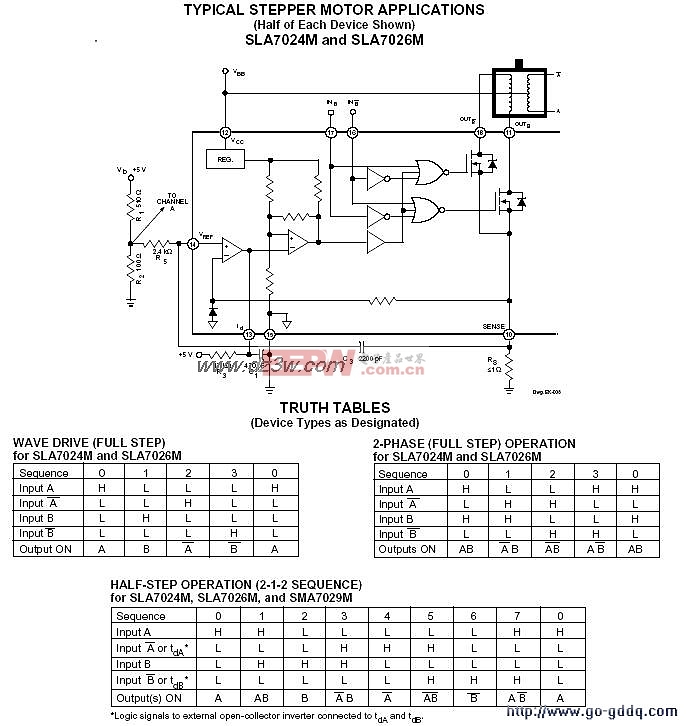
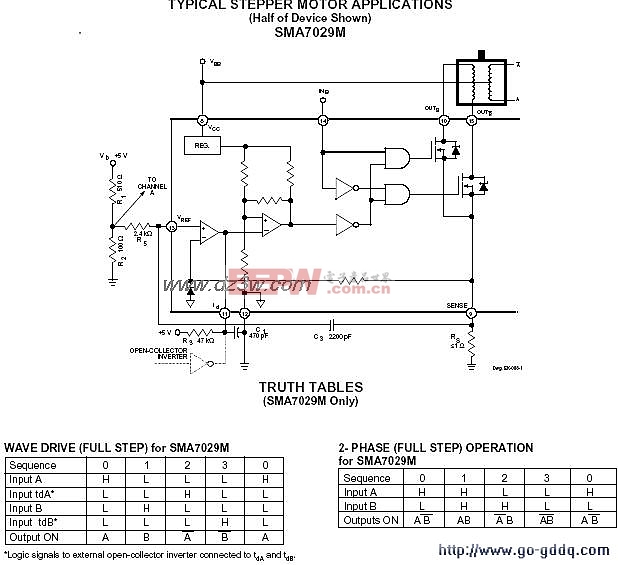
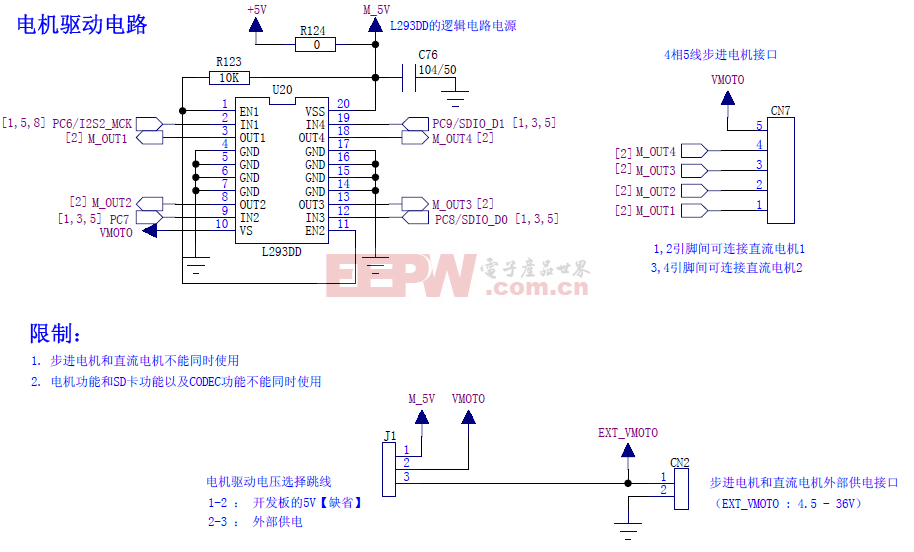
在实际制作中,我们选用大功率达林顿管TIP122或场效应管IRF530,效果都还不错,为了使电路简化,建议使用集成有桥式电路的电机专用驱动芯片,如L298、LMD18200,性能比较稳定可靠。





评论