LabVIEW机器人模块――机器人选板中的特殊算法和API

概览
本教程对LabVIEW机器人模块软件自带的机器人算法进行介绍。从传感器直至路径规划,您都可以使用这个产品来设计新一代的复杂的自动化系统。
LabVIEW机器人模块带有全新的功能完备的“机器人”选板,其中包含了设计下一代机器人控制器所需的全新算法。这个全新的函数选板包含了从传感器驱动程序直至反向运动学的所有功能。详情请参考LabVIEW帮助(见下面的链接),了解关于机器人VI的更多信息。
* 利用连接VI与其他机器人软件一起工作,包括例如Cogmation、MobileRobotics、Skilligent以及Microsoft的第三方产品。
* 使用回避障碍物VI,实现移动机器人车辆的回避障碍物功能。
* 使用路径规划VI,在表示机器人周围环境的地图中计算到达目标点的路径长度。
* 使用协议VI,在LabVIEW中处理格式化为不同通信协议的数据,例如通过传感器发送的数据。
* 使用机器人手臂VI,创建一个虚拟的机器人手臂并与其进行交互。您可以实现手臂上的动力学与运动学计算、对手臂进行仿真,并对机器人手臂进行原型开发。
* 使用传感器VI,可以配置、控制并恢复机器人系统中常用仪器的数据,例如串行设备和USB设备。浏览仪器I/O选板或使用NI仪器驱动程序搜索器,搜索并安装其他仪器驱动程序。
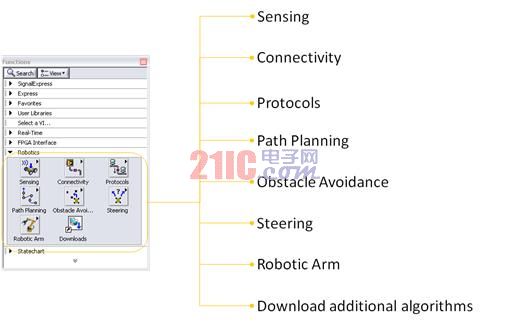
图:LabVIEW机器人模块带有全新的完整“机器人”选板,其中包含了设计下一代机器人控制器所需的全新算法。
连接传感器与执行器
从LabVIEW编程语言的第一个版本开始,它就一直通过连接仪器和设备,为工程师节省时间。现在的LabVIEW是使用高质量的丰富仪器驱动程序来连接仪器的行业标准。LabVIEW机器人模块利用这个优点,将整套机器人传感器和执行器连接在一起。这些驱动程序免去了耗费时间的机器人系统驱动程序编写、测试以及实现过程。实际上,LabVIEW机器人模块包含许多传感器驱动程序版本,用于Windows、实时模块和基于 FPGA的平台,确保您能够适当地连接到传感器,以满足您的I/O输入需求。












评论