转子振动信号的盲源分离研究

1 引言
盲源分离(Blind Source Separation, BSS)问题是20世纪80年代提出的[1],Jutten在90年代初给出严格的数学描述[2]。其真正被重视只是近10年的事。盲源分离的研究涉及到人工神经网络、统计信号处理和信息论的有关知识,现在已成为人工神经网络的重要发展方向之一[3]。盲源分离的开拓性研究起源于Jutten与Herault于1991年的论文[2]。P. Comon首先提出了盲源分离的独立分量分析(Independent Component Analysis,ICA)方法[4]。A. J. Bell和T. J. Sejnowsk在盲源分离算法的发展史上作出了重要贡献,带动了后续的研究工作[5]。国内关于盲源分离的研究最早始于1997年[6],主要集中在电信传输信号的盲识别上。
盲源分离主要分为线性混叠和非线性混叠两种[7]。非线性混叠的主要有通过对线性模型的扩展和用自组织特征映射的方法[8]。
对于振动信号的盲分离,从2000年才开始受到重视[9],并且研究的范围主要在旋转机械和故障诊断中。
2 盲源分离基本概念
盲源分离问题可用如下的混合方程来描述[4]:
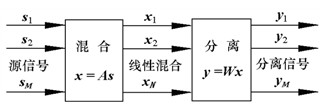
图1 线性盲源信号分离框图
事实上,在盲的范畴里,人们不可能实现源信号的完全恢复。盲源信号分离的求解结果有两个不确定性:分离后信号向量的排列位置可以变化、信号的幅值与初始相位可以变化。很明显,这样的不确定性对源信号的分离不会有任何实质的影响。
3 振动信号盲分离的常用算法
3.1 最大似然准则算法
最大似然估计是要找到矩阵W使得所估计的输出y的概率密度函数(PDF)与假设的源信号的PDF尽可能接近,是一种非常普遍的估计方法。
3.2 最小互信息准则及其算法
基于信息理论的最小化互信息的基本思想是选择分离矩阵W, 使输出y的各分量之间的互依赖性最小化,在理想情况下趋于零。
3.3 基于高阶累积量的方法
Cardoso提出了应用四阶矩进行盲信号分离的方法。在这个基础上,人们从度量的非高斯性出发,得到快速的定点盲源抽取算法。另外Tong和Liu通过正交变换,对观测到的混迭信号的四阶矩进行奇异值分解(SVD),得到一类扩展的四阶盲辨识和多未知信号提取算法。Cardoso还提出了基于四阶累积量的联合对角化。独立成份分析方法中的峭度与负熵也是基于高阶累积量的盲源分离方法。
3.4 非线性混叠盲源分离
大多数的盲源分离算法都假设混叠模型是线性的,更为准确的模型应当是非线性的或弱非线性的。人们针对非线性混叠模型提出了以下几种方法:(1) 基于两层感知器网络的感知器模型法[20];(2) 基于自组织特征映射的无模型方法;(3)径向基函数网络法,这种方法鲁棒性较好。
4 振动信号盲源分离方法的探讨
4.1 估计分离矩阵的加速梯度法
在最小化互信息准则的基础上,有关研究推导分析出加速梯度法的计算步骤,然后对转子的振动信号进行采集并盲分离,得到了满意的结果。
在一个转子试验台上安装2个加速度计和1个涡流传感器采集信号,得到的传感器信号与分离结果的功率谱,如图2和图3所示。
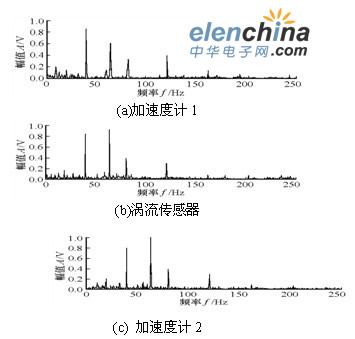
分析表明,基于最小化互信息原理的加速梯度法能够较好地估计出分离矩阵, 其实现步骤可行。
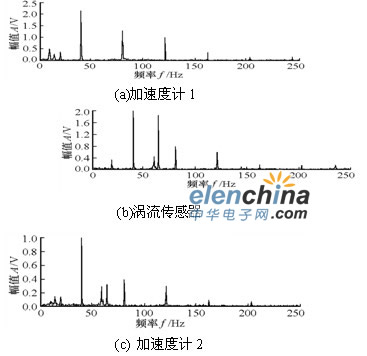
图3 分离后各传感器振动信号的功率谱
对具有故障的实际转子进行多传感器信号采集并进行盲分离,结果表明:采集信号中混叠的不同故障特征能够较好地分离开来,分离后各传感器信号的功率谱图基本上只显示出一种故障特征。但是旋转激励的影响不能从盲源分离的结果中完全消除。
4.2 卷积混合盲分离时域方法
有许多文献用卷积混合矩阵模型对BSS进行了研究。基于时域信号的盲分离[24]方法对数值信号进行卷积混合并进行盲识别,如图4所示。混合后两个源信号分离结果说明所用算法在低频段可给出好的分离结果,且可分离信号中的谐波信号[25]。
实际工程中的信号源个数是不明确的。可在人为设定源信号个数m的基础上,进行随机迭代,最大化各个分离信号y(n)。
对动力机械结构的不同位置上安装5个传感器,进行振动信号采集,并对采集信号用卷积混叠矩阵进行盲分离。结果表明,靠近激励源的两个传感器(4、5两个传感器)得到的信号被方便地分离出来,而其他测点的传感器采集信号难以收到理想的分离结果。这与理论方法是一致的。
第5个传感器的原始信号和分离结果如图5所示。可看出,实际的信号在时域和频域都难以直接观察出来。进行盲分离,得出两个典型的周期信号及一个随机信号。图5(b)是两个周期信号合成的频谱。两个周期信号分别是发动机、电机旋转频率[26]。实际振动信号进行的源信号盲分离表明,所用方法在机械振动信号盲源分离中是适用的,信号得到较好的分离。
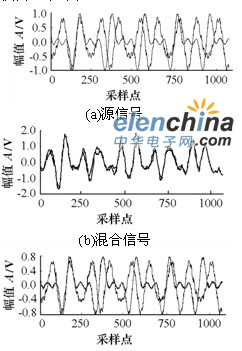
图4 两个谐波信号的分离
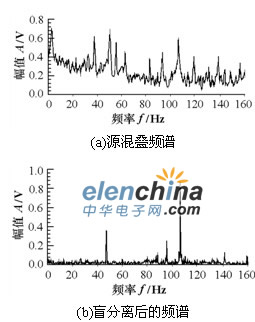
图5 实际振动信号的盲分离
4.3 基于峭度的快速定点算法
经典的测量非高斯方法是峭度(kurtosis)或称四阶累积量。有关研究用基于峭度的快速定点算法对真实的转子振动信号进行了盲源分离研究。在转子振动试验台上安装4个加速度传感器,三个加速度传感器是安装在轴承座上的,另一个安装在垂直于转子轴的连接盘上以便测量轴向的振动情况。试验时的转速为525转/分。由此得到4个采集信号。
值得注意的是,实际采集的信号一般就是混合后的信号。所以前述数值仿真分析方法中,“信号混合”这一步就不需要了,可以在直接对采集的信号进行预白化处理后,再用基于峭度的快速定点抽取算法进行分离。
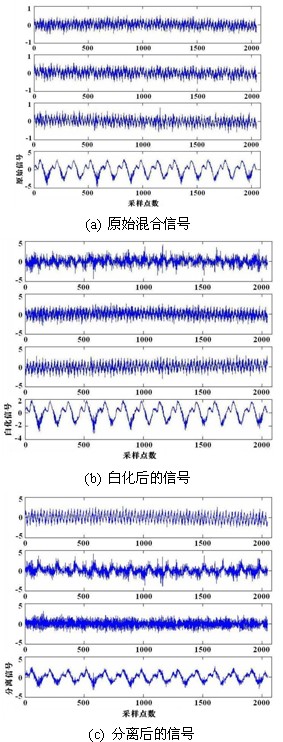
图6 转子振动信号的盲源分离
由传感器测得的4个振动源信号如图6(a)所示;预白化处理后的信号、分离后的信号分别如图6(b)、(c)所示。从图6(a)可看出,从原始的转子振动信号中只能分辨出轴向冲击信号,而其他3个信号波形十分相近,无法识别出哪个信号是哪个振动源产生的。从图6(c)中能够清晰地分离出不同的振动信号源。第四个信号是明显的轴向冲击信号,第二个信号是转子旋转的信号,第一个信号是轴承滚子的冲击信号,第三个信号是噪声信号。这说明用基于峭度的快速定点算法对转子振动信号的盲源分离是十分有效和成功的。
4.4 改进的基于Jacobi优化的极大似然估计方法
在传统的Jacobi优化算法的基础上,文献[10]探索了一种具有初始化四阶矩矩阵的优化算法,来提高算法的收敛速度和计算效率。
用6个模拟源信号进行混合,分别用FastICA算法、JADE算法来与改进Jacobi优化算法进行比较,采取采样点数从5000变化到30000,来依次统计各个算法的计算时间。3种算法的计算效率如图7所示。可以看出JADE算法的计算时间相比于其它两个算法要长,这在大采样点情况下表现更为明显,而基于初始化四阶矩矩阵的算法与FastICA算法有着接近的计算时间(相差3%左右)
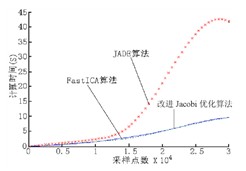
图7 三种算法的计算效率
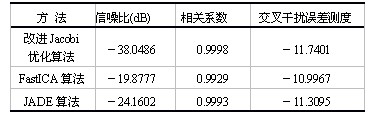
利用仿真试验来分析各个算法分离信号的信噪比、相关系数以及交叉干扰误差测度,如表1所示。这三个指标的值越大表明算法实现的分离信号就越逼近源信号,分离的性能就越优良。从表1可以看出,该算法可以得到优于其它两个算法的信噪比、相关系数以及交叉干扰误差测度。所提出的算法在分离信号的性能指标上远优于FastICA算法。
4.5 鲁棒的二阶非平稳源分离方法
D. T.Pham对于一组对称正定矩阵{Mi}提出了一个不同的准则,它不需要进行任何预白化,而且对角化矩阵同时也是分离矩阵[30]。对于有不同功率谱(或等价于不同的自相关函数)的有色源,可以使用时滞协方差矩阵,并由此得到了二阶盲辨识(SOBI)算法。Choi和Cichocki对非平衡源SOBI进行修改,提出一种高效灵活的二阶非平稳源分离(SONS)方法 [31]。
表1 各个算法分离信号的性能指标
用与4.3节相同的实验台,用SONS算法对噪声含量较少的转子系统中低转速数据进行分离,与基于负熵的快速定点算法相比,SONS算法在分离效果上的改善很小。在含有大量噪声的高速旋转情况下,基于负熵的快速定点算法对转子振动信号的分离结果如图8(a),在改用SOBI算法后,分离结果得到了改善,如图8(b)。而在改用SONS算法,分离结果的改善则很明显,如图8(c) [32]
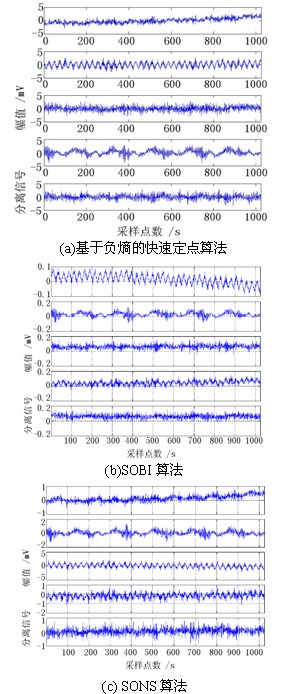
图8 用三种算法对高速数据盲源分离结果的比较
5 结论
本文介绍的内容为将盲源信号分离技术应用于机械振动信号的故障诊断提供了一个依据,也为盲源信号分离应用于实际工程信号的处理打下了基础。
今后应该着重研究的发展方向主要有3个:
(1) 如何实现在观测量个数源信号个数不确定或未知时的盲分离方法研究。
(2)更一般的非线性混叠的可分离性的研究。
(3)对含有噪声的混叠信号进行盲分离方法的研究。









评论