为什么抖动测试像盲人摸象(下)

相关性研究揭示了不同的抖动分析方法(“Scopes”)在不同的条件下给出了不同的结果。一致性研究的仪器包括1台BERT,3台实时采样示波器,1台等效采样示波器,和1台时间间隔分析仪,有些仪器和相关性研究中的一样。因为我们主要关心了解相关性和一致性的方法,延续在相关性研究中的标签,将5种分析方法称为“Scopes H”到“ScopeL”。
在一致性研究中,我们比较了不同scopes在精密抖动发射器产生已知抖动幅度下的测量结果,关注Tj和Rj的测量结果,因为他们对于诸如PCIE,FibraChannel,SATA,SAS,FBDIMM等标准的一致性验证是非常重要的。Dual-Dirac定义的Dj在标准中也是非常重要的,如上所示,并非所有的制造商清楚地指出报告是Dual-DiracDj或者是试图测量实际的peak-peakDj,一旦得出Rj和Tj,Dual-DiracDj是完全受约束的。
精密抖动发射
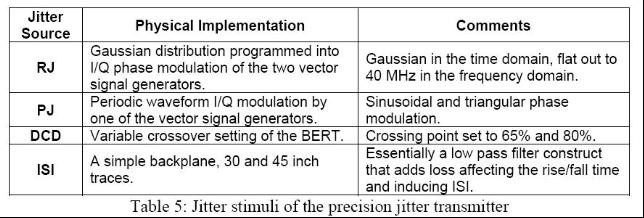
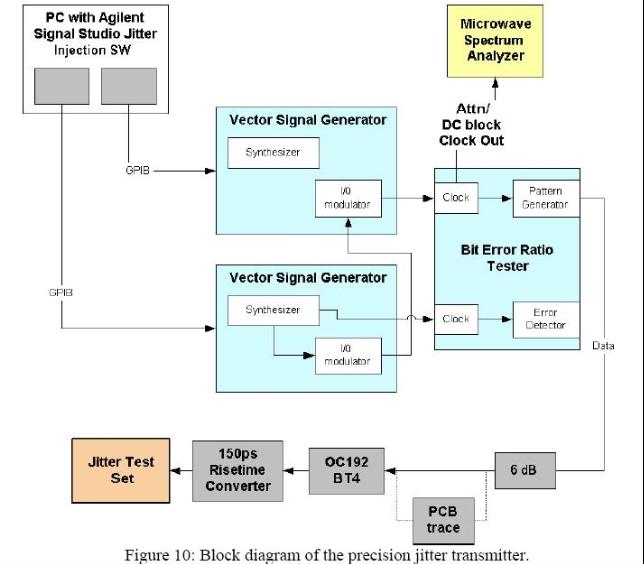
由于精密抖动发射器的设计和校准是一致性研究的基础,如Figure10所示,发射器被设计成采用大范围不同幅度和Rj,Pj,ISI,DCD的混合产生一系列大的Tj值。高斯Rj由rms宽度δ决定。Pj,ISI,DCD的peak-peak值由分布的peak-peak扩展决定。系统调试和一致性测试的相关Dj分量是依赖于Dual-Dirac模型的Dj,我们从Tj(10-12)校准水平和Ref.[1]描述的Rj计算出Dj。
我们选择可获得准确测量的方法的条件,我们工作在一个单一的数据速率2.5Gb/s,一个单一的测试码型,一个长度为2^7-1的标准PRBS,一对使用了单端传输线的单一NRZ逻辑电平,280mV表示逻辑“1”,-280mV表示逻辑“0”。
由于每个测试装置产生的Rj都符合高斯分布的假设,我们运行大的长度以便提供能在BER至少为10-12下符合带有尾巴高斯分布的Rj信号,并且在频域上是平滑的(平滑超出大约40MHz)。我们做了不同噪声源的详尽分析,但是没有一个尾部符合要求程度的高斯分布。出于这个原因,我们使用两台矢量信号发生器提供Rj。
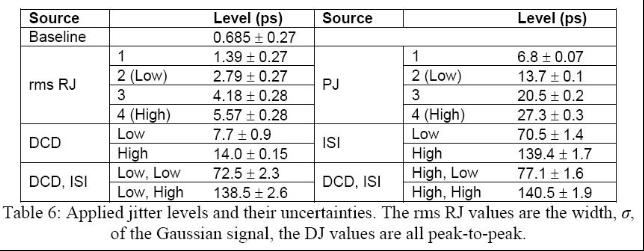
抖动幅度的校准可追溯到NIST。但是,发射器基线的校准,当没有抖动有意使用时由发射器产生的抖动仅部分可追溯到NIST[2]。独立于发射路径的基线发射器的抖动分布和不确定度为0.27ps的基线rmsRj为0.685ps的纯高斯分布是一致的。基线ISI由传输路径介于抖动测试装置和不确定度为1ps的3.9ps的发射器产生。正弦和三角Pj的幅度不确定度优于1%。Rj发射信号精确度大约是1.5%,但是带有发射器基线的额外常数。DCD的校准水平精确度少于或大约是1ps,ISI的校准水平准确度大约是0.5%。DCD和ISI混合的校准完全由ISI和DCD的相互影响计算出。误差在下边数据中由在Ref.[2]中描述的给定的抖动条件不确定度累计。不确定度通过这个文档用图表给出了测试设备性能的一致性范围,举个例子,如果在没有抖动的情况下一个测试设备给出的Rj值为0.9ps,另一个给出了0.5ps,这两个测量都和我们能分辨出的最好的保持一致。由于我们完全理解每个Rj和Dj信号和其依赖关系,Tj(10-12)校准直接计算得出。
抖动测试条件
研究的这一部分,我们选择了能反映实际应用的抖动幅度。我们使用ISI和DCD的三个幅度,分别称为关(O),低(L),高(H),Rj的5个(包括“off”)幅度和用0~4标示的正弦Pj。低幅度类似于一个网络元素会导致和仍然通过大多数标准的一致性测试,高幅度类似于仅仅通过或完全不通过。在大多数应用中,Tj(BER)占统治优势的是Rj和ISI的时间分量。Rj的典型范围在2-5ps,相当于Tj(10-12)值28-70ps。一致性测试中,我们选择如表6所示的4个Rj幅度——这些值比在相关性研究要小的多。ISI可以大范围改变;典型的30-45英寸背板迹线在2.5Gbps时会产生70-140ps的peak-peak。我们通过在传输路径插入30和45英寸长的PCB迹线从而产生与两个幅度对应的ISI,如图6所示。典型的Pj真实值是很难估计的,如果板上的晶振屏蔽良好,Pj的水平是0。出于代表性,我们选择对于所有的正弦(15MHz)和三角波(2MHz)peak-peakPj幅度在7-28ps的范围,如表6所示。三角波抖动用来检测Rj测量的频谱技术——低幅值,高频率的Pj谐波能否引起Rj错误。表6中给出的不确定度包括基线和标准方式生成信号校准的统计和系统不确定度。rmsRj净值不确定度大约是10%,peak-peakDj大约是2%。
Scope配置
Scopes配置主要是两方面。第一,配置被设计成不同的测试装置应给出相同的结果。举个例子,被配置成测量全抖动-频率带宽。第二,Scopes被配置成使用最小改变的默认设置和适用于所有测试情况的单独配置,这也是大多数工程师设置设备的方法。我们使用用户手册里指明给出最好结果的设置。
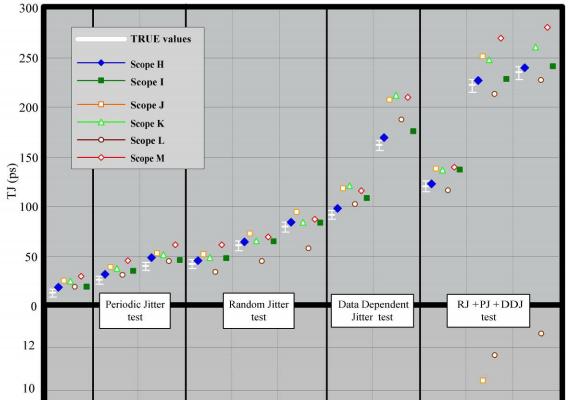
抖动测量和精密源之间的比较
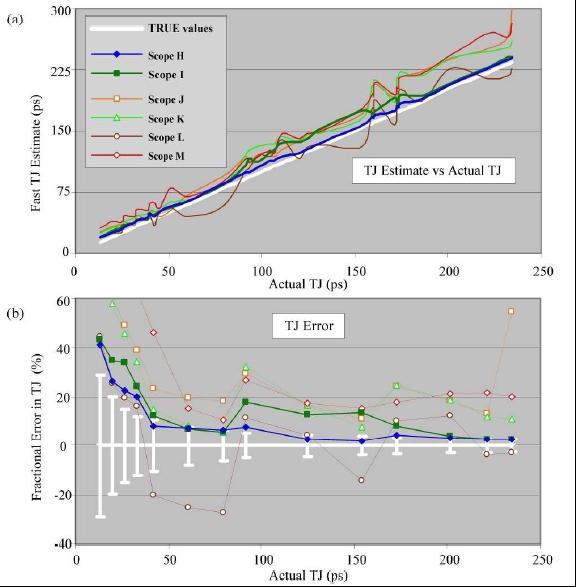
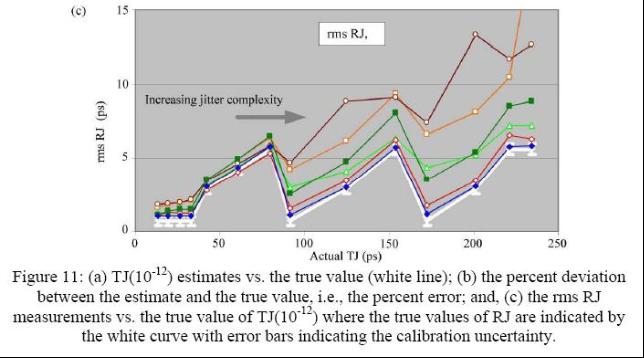
Figure11a给出了相对于校准的实际Tj(10-12)每个Scopes曲线的最快Tj(10-12估计。Figure11b给出了通过估计表明校准不确定度的误码柱估计而得出的Tj误码百分比——任何在垂直跨度内的测量值应该考虑成和真实值一致。Figure11c展示了Rj的测量值vs真实的Tj(10-12),包括真实的Rj值和他们的不确定度。简单抖动环境下的Rj测量值和真实值之间的偏差是小的,但在复杂的环境下大多数分析仪的不准确度介于100%和500%之间。
Tj(10-12)值<25ps的不确定度由接近Tj噪底的发射器基线和抖动分析仪决定。从左到右(Figure11),抖动条件变得越来越复杂。Tj极小的误差对于大多数分析仪都是更大或更小的常数。但是,Figure11a和Figure11c所示从校准值(白线)得到的测量值的偏差显示了随着抖动条件越来越复杂,大多数抖动分析仪的精度下降了。
Figure11展示了我们的主要观察:当分析由Rj引起误差的noise和DDj时抖动分析技术失效了。三个影响抖动分析精度的关键部分是:
1.低电压噪声数据采集。测试设备的电压噪声会转化成时序噪声和引起RJ的错误。问题是带有缓慢上升/下降时间的信号逐渐变得严重,比如,在高ISI环境中。
2.和测试码型是相关的(比如DDj)抖动应该可以从非相关抖动(比如Rj*Pj)优先测试δ分离出来。对于使用适应算法从而得出Rj的趋势和引起DDj误差的Rj,DDj改变了抖动分布和浴盆曲线特性。
3.Rj(比如δ)应该由抖动频谱的噪底积分获得。
为什么不同的Scopes给出了不同的结果
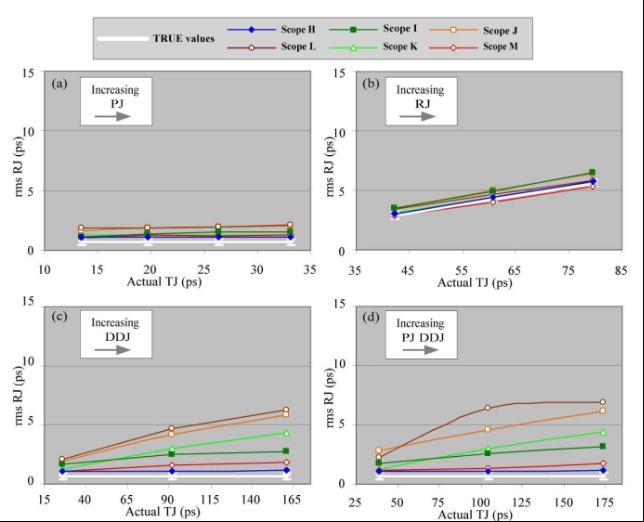
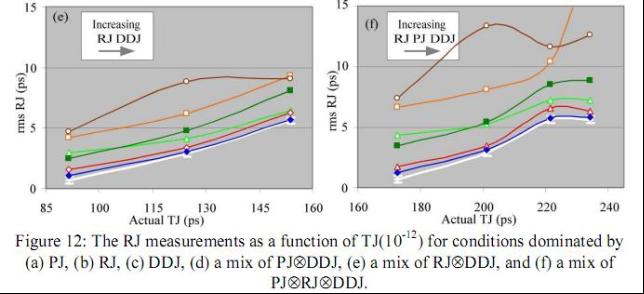
不一致的最大原因如Figure12所示,Rj从不同的抖动条件中分离出来。Figure12a和Figure12b展示了所有的Scopes在仅有Rj或Pj简单的条件下表现良好。Figure12c和Figure12d展示了随着传输通道长度的增加导致了——DDj的增加和Rj的恒定——大多数分析仪给出的Rj值增加了;那就是,Rj引起了DDj误差。至少有两个原因:第一,Scope的电压噪声转化成了时序噪声和解释为Rj;第二,随着Dj源的组合变得复杂,Dj分布尾部变得平滑和重新呈现出高斯分布,引起适应尾部的技术,或者误码率作为采样时间延迟的函数BER(x),或者很难从Dj辨别Rj的抖动分布。
硬件的影响
精密的抖动发射器通过PCB迹线的滤波和衰减效应产生ISI。另外为了通过ISI的时间分量增加DDj,ISI的垂直分量增加了信号的上升/下降时间和抖动仪的噪声转化成每个报告RJ的抖动分析算法。
在相关性研究中,Scope电压噪声的影响被非常高的Rj9psrms淹没了。实时示波器的噪底跟垂直灵敏度设置到最小时的绝对噪底是息息相关的。我们研究用的实时示波器拥有30-40mdivrms的噪底。垂直灵敏度设置为100mV/div时,实际的噪底是3-4mVrms。等效采样示波器的噪底典型值是0.25mV。Scope采样时钟抖动,触发抖动,时基的线性度,以及由电压噪声降低的转换时间精度影响是非常惊人的。
算法的影响
算法方面,数据系列中测到的Rj不包括DDj是非常重要的。随着更多Dj分量产生,Dj的分布逐渐呈现高斯分布。为了防止算法将DDj报告成Rj,应该测试数据系列中跟测试数据非相关的Rj。我们可以通过Figure11看到这种情况。ScopesI,J和L使用一种或其它类型的过滤技术将Rj从整个数据系列中抽取出来。位于100和150ps的区域由带有低Rj和高DDj的抖动条件决定,随着抖动条件变得越来越复杂这些Scopes的Rj逐渐被高估,原因是随着越来越多的Dj源被包括进来Dj分布的边界变得光滑并重新呈现高斯分布。当DCD和ISI组合成Pj的不同形状时,分布的边缘是浑浊的。光滑的Dj分布由一个尾部可被高斯界定分布的高斯Rj结果缠绕——但并不是Rj高斯,有点比潜在的Rj宽度δ拥有更大宽度的高斯。现在观察ScopesH和K测量中去掉从数据优先提取了Rj的DDj并给出最准确的Rj测量。
相关抖动比如DDj一旦从分布中去除,等于Rj在抖动频谱中的有效值噪音给出更准确的Rj结果。最好精度的频谱技术的原因是简单的。精确适应到BER(x)的尾部或抖动分布要求大量的统计样点以保证fit中包含的区域主要由Rj而不是Dj决定。当移除相关抖动长时运行时,对于非相关抖动是可能的——比如三角Pj——扭曲了fit。使用抖动频谱量测Rj的潜在缺点是通过在频谱中摹拟噪声污染非相关分布的相邻通道串扰是可能的。一个两难的途径是相邻通道关闭时测量Rj,然后打开串扰通道并执行不带有串扰的并将Rj值固定到测量值的抖动分析。
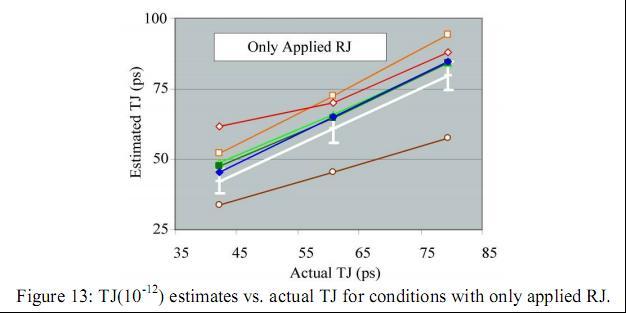
大多数飘忽不定的结果都由空褐色圆圈曲线所示的ScopeL给出。在Rj决定的环境中对Tj的低估说明算法参数影响是如此之大。如果我们仅仅考虑带有Rj的抖动条件很容易看到发生的情况。Figure12b说明当Figure13中没有DDj时ScopeL给出了准确的Rj测量值,Figure12b所示估计的Tj(10-12)表明ScopeL在这些条件下低估了Tj(10-12)。ScopeL使用适应技术测量Rj。在Rj决定的条件中,大多数naive,不精确的,应用Dual-Dirac模型应该给出准确的Tj估计值。Rj是准确的而Tj并没表明ScopeL抖动算法的设计者在调整其他分量时缺少一点想象。
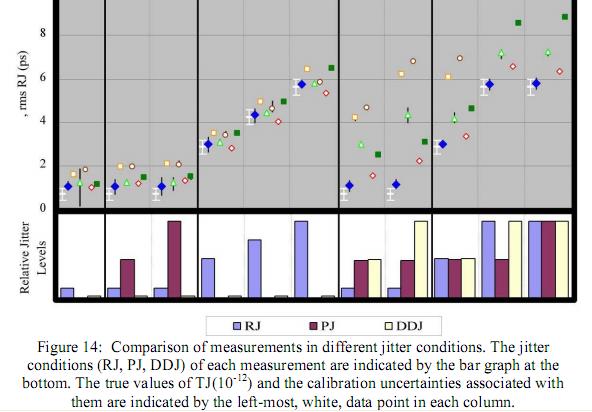
一致性测试的小结
使用精密抖动发射器要求巨大的校准努力,但结果不会引起歧义。Figure14表明Tj和Rj测量的小结,图片中的每一列是一系列和给出抖动条件相关的测量结果。每列的底部的柱状图表示每系列的抖动条件。在Tj和Rj测量的不一致中增加的DDj的影响是巨大的。
结论
抖动测量值相关性和一致性的研究结果表明量化抖动分析仪器的准确性是可能的。
相关性研究表明不同的抖动分析仪在不同的情况下会给出巨大差别的结果。在这儿使用的恶劣条件可以推断抖动分析仪在研究测量趋势和特性的特别条件下的可靠执行能力。对于任何一个单一的抖动测量,判断哪个抖动分析仪正确是困难的。当抖动源可以独立变化时,辨识抖动分析仪在特别环境下和在众所周知的特性和趋势下产生的结果相比是容易的。这种方法的好处在于事实上不需要一个精密的抖动参考,只需要一个线性抖动产生源。相关性研究提供了在高压力条件下抖动分析仪准确性的分析方法。
一致性研究表明干净数据采集硬件和深思熟虑软件在一起提供了抖动测量的最好准确性。关键的算法技巧是首先分离抖动分布性,哪些和非相关并将Rj从非相关采样的抖动频谱的随机噪声提取出来。包括Rjrms,δ,Dual-Dirac模型决定的Dj测量值是简单的并能准确估计在平直的低BER时的Tj。这个方法的好处是提供了分析抖动分析仪精度和准确性的途径,但是缺点是这套装置需要更多的设备和校准。
最后,抖动仍然是一个相对复杂的话题。但是随着对每个抖动分量本质和相互间影响的很好理解。简化好的抖动分析算法的条件和辨别一个好的抖动测量方案是有可能的。

评论