某轻型驱动桥有限元动态分析

1 有限元模型的建立
1.1 网格划分
将后驱动桥的CATIA模型导入HyperMesh中,根据计算需要进行适度的几何清理,去除一些不影响计算结果的特征。网格的划分尽量采用六面体,因为六面体单元与四面体单元相比既能缩短计算时间又能提高计算精度,故将除差速器壳和主减速器壳外的其它零件全部采用六面体单元进行网格划分,且网格大小控制在3mm左右;同时,在网格划分的过程中随时进行网格质量检查及网格间容差的检查,以保证网格的质量。各关键部件的模型如图1所示。

图1 后驱动桥有限元模型
建立好的有限元模型导入有限元求解器中,进行材料参数的定义,主要部件的材料属性如表1所示。
表1 主要部件的材料属性
2.1 约束
根据实际工况,约束两板簧座上表面节点X、Z方向上的平动和绕Y轴的转动,主减速器壳前端Y、Z方向上的平动及绕X轴的转动。
2.2 加载
参照汽车行业标准QC/T 533-1999的试验加载条件,将试验加载条件换算到本驱动桥上,输入端的端面上施加1534r/min的转速;在左、右轮毂端面上各加载42N·m的反向转矩。施加情况如图2、图3所示:

图2 转速施加情况
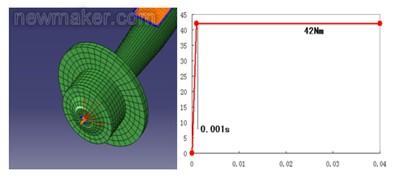
图3 转矩施加情况
2.3 接触定义
根据各零部件实际的连接情况,将主被齿、主齿与轴承、主齿与主减速壳、半轴与轴承、轴承内外圈与轴承滚子之间等的连接全部设置为面面接触,共计28个面面接触对,其余则定义为刚性连接。主被齿之间的接触关系如图4:

图4 主被齿接触对
3.1 模态分析结果
后驱动桥有限元计算和模态试验结果对比如表2:
表2 有限元约束模态计算结果与模态试验结果

评论