CAN总线在织机状态远程集中监控系统应用

1 织机状态远程集中监控系统方案
本文引用地址:https://www.eepw.com.cn/article/201612/332204.htm织机工作状态参数众多,对于织机状态远程集中监控系统来说,其主要目标是在异地对织机群整体状态数据完成采集,提供计算、统计、分析和查询功能,并能够存储、浏览和打印各类报表,为生产提供信息管理服务。主要包括:
(1)织机主要工作参数的监测。如生产班次、织机机台号、车速、引纬率、产量、织物品种、织疵类型、停机时数、故障原因等。
(2)织机生产数据的分析与处理。如岗位、车间和企业层次的不同产品产量报表、各织机的工作效率、故障分类及原因等。
根据这一目标要求,加上织机正常工作时工作参数较多,没有必要将单台织机的各种数据全部集中到监控端处理,因此织机状态远程集中监控系统采取分级监控的方法。由于CAN总线是主要用于各种过程监控的一种网络技术,为多主工作方式,可以进行点对点、一点对多点和全域广播方式传递信息,且通信速率最高达1Mbps,传输距离可以达10km,具有极高的可靠性和较好的灵活性和实时性的优点。利用CAN总线所具有的这些优势,采用CAN总线作为织机状态信息双向通信的网络,实现对织机状态远程集中监控。织机状态远程集中监控系统结构示意图如图1所示。
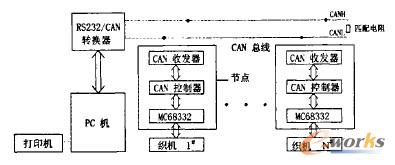

图1织机状态远程集中监控系统结构示意图
由图1可知,该系统由单台织机监控管理级和上位机远程集中监控管理级两大部分组成。单台织机监控管理级主要由32位单片机MC68336完成织机工作参数设定、织机五大运动控制和织机工作状态参数数据的处理,实现对单台织机工作状态的数据采集、处理和控制。
上位机远程集中监控管理级主要由计算机、CAN总线和其他辅助外部设备如打印机等组成。CAN总线节点由单片机MC68332、CAN控制器、CAN收发器组成。CAN总线系统很容易扩展成针对多织机对象的监控系统。
系统的工作过程如下:系统开始工作时,对各个CAN总线节点MC68332、CAN控制器等进行初始化,MC68332接收织机各传感器检测的织机运动状态参数进行数据处理,并将部分工艺参数显示在织机显示屏上。另一方面,上位机向CAN总线发出读取各节点织机状态参数的命令,MC68332接到命令后,将织机的主要工作参数,如织机机台号、车速、引纬率、织物种类、产量、停机时数、故障原因等,按CAN规范规定的格式将其写入CAN控制器的发送缓冲区内,并启动发送命令,通过CAN总线传输给上位机进行分析处理,实现CAN网络上的信息的接收与发送。
2 CAN总线系统节点硬件设计
CAN总线系统节点是网络上信息的接收和发送站。本系统采用MC68332单片机作为CAN网络的智能节点。CAN通信控制器选用SJAl000型,CAN收发器选用与之匹配的82C250型。CAN总线系统节点电路如图2所示。
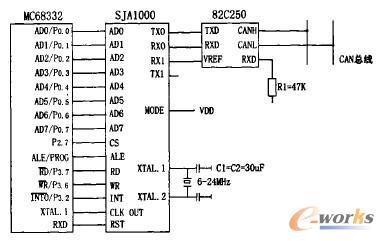
图2 CAN总线系统节点电路如图
为了保证CAN与MC68332单片机之间的时序同步,由CAN控制器SJAl000给MC68332提供时钟信号。在实际应用时,82C250的CANH和CANL引脚通过一个120Q的电阻与CAN总线相连,起到限制过电流对82C250的冲击作用,提高数据通信系统的抗干扰能力。
必要时,为了提高节点的抗干扰能力,可以在CAN控制器和CAN收发器之间增加光电隔离电路。由于CAN网络不能直接连接到上位机的串行口,因此选用RS232,CAN转换器实现相互之间的通信。

评论