倒车雷达主控芯片GM3101的功能特性分析

从目前市场情况看,国内倒车雷达生产厂家都是使用单片机控制方案,缺乏单芯片方案,如果能用单芯片实现整个系统功能,对倒车雷达生产商来说,不仅能降低开发和生产成本,对整机的可靠性也会有很大提高。目前成都国腾微电子有限公司推出了一款倒车雷达主控芯片——GM3101,与传统方案相比,它将信号处理电路和单片机软件设计都集成在芯片内,用户几乎无需调试就可以推出整机方案,大大缩短了用户的开发周期和人力成本,也降低了倒车雷达的技术门槛。
主控芯片GM3101的功能特性
倒车雷达主控芯片GM3101的主要性能参数为:工作温度为-40℃~+85℃;电源电压为5V;检测范围为0.3~3.95米,检测精度为0.05米;报警输出周期为150.4ms。4个探头轮流采样一次输出一次报警数据,它采用双线差分方式输出报警信号。报警信号包括:各探头检测到的障碍物距离危险等级信号、最近障碍物方位信号、最近障碍物距离信号及附加消息。与传统的单片机方案相比较,其优势还在于:防声波衍射误报处理,提高报警信号的准确性;环境适应功能,提高报警功能的实用性;智能识别功能,可以忽略小物体,防止误报警。GM3101的内部框图如图1所示。
从图1可以看出,该芯片集成了信号处理部分和测距运算部分。当芯片接通电源后,探头驱动引脚向超声波探头发送驱动信号,驱动超声波探头发出超声波信号,驱动信号发送完毕后,芯片等待信号返回。探头接收到超声波信号后,将信号送入芯片,进行信号放大、滤波、模数转换处理,记录信号发送和接收的时间差,根据此时间差计算障碍物距离,并输出报警信号。超声波探头驱动采用分时顺序的驱动方式,即依次对4个探头轮流进行驱动,一个探头的工作周期内要包括发送和接收两种操作。4个探头检测完成构成一个检测周期。若前一探头在本工作周期内没有接收到返回的超声波信号,则芯片也转入控制下一个探头的工作。
余振处理及增益控制
1. 余振的处理
倒车雷达的设计过程中,余振的消除是一个让人头痛的问题,由于目前倒车雷达采用的探头都是压电陶瓷探头,所以当探头对外发出16个超声波的同时,其自身的反射也会产生一部分余振,余振的信号幅度由大到小变化。由于用户使用的探头不一致,余振时间也不相同,一般来说,余振时间为1.5ms~2ms。由于余振出现在信道上,所以在余振时间内所检测到的信号都会被余振淹没,在余振时间内就检测不出有用的信号,当然也就无法测出相应的距离。所以在倒车雷达设计中提出了一个“盲区”的概念,也就是说由于有探头余振的存在,就造成了在0.3m以内倒车雷达的“盲区”。如果在设计中不消除余振,系统就会把余振当作有用信号,输出错误的报警信号。GM3101在以下几个方面对超声波探头的余振进行了有效的处理。
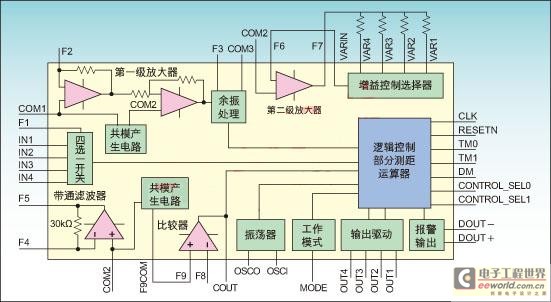 |
图1:GM3101内部框图 |
 |
图2:输入端箝位电路图 |
 |
图3:第一级放大电路原理图 |
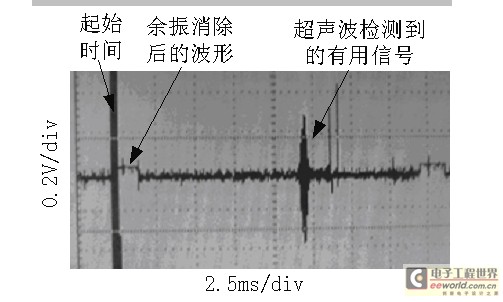 |
图4:消除余振后的信号波形(在引脚F3上观测) |
在第一级放大电路中对余振进行了屏蔽,但考虑到用户使用的探头类型不一,余振时间差别较大,如果在第一级放大电路中对余振没有完全消除,可以通过峰值检测电路中的余振屏蔽电路对尚未消除的余振进行处理。峰值检测电路信号波形如图5所示,峰值检测电路进行了余振屏蔽,起始时间开始后的1.8ms以内将输出信号拉到低电平,完全屏蔽超声波余振。芯片所检测到的最近距离也就是实际物体的距离。
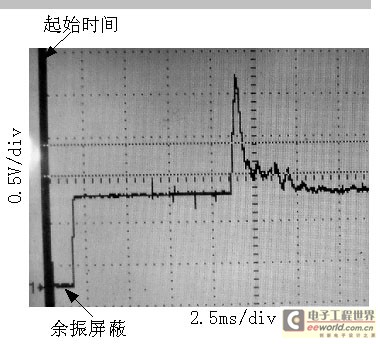 |
图5:峰值检测电路波形图 |
超声波回波信号有一个现象,即近距离物体发射回来的信号较强,远距离物体发射回来的信号较弱。如果要检测远距离物体,就需要加大放大倍数,余振也会被相应地放大,为以后屏蔽余振带来困难。如何设置放大倍数兼顾远近距离,这就是电路设计的关键,我们采用自动增益选择器来解决这一问题。对远距离物体,放大倍数较大,对近距离物体,放大倍数较小。在设计第二级放大器时,根据物体距离的不同而采用四种不同的放大倍数。图6为第二级放大电路原理图。
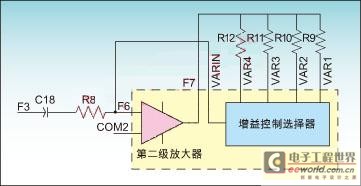 |
图6:第二级放大电路原理图 |
观察在引脚F7处的近距离物体和远距离物体的信号波形图,通过对比可以看出,由于采用了自动增益选择器,实现F7信号幅度基本相同,保证距离为3m的物体也能够检测到。
本文小结
通过上面的介绍,我们可以看出由于GM3101采用了余振屏蔽和自动增益控制器,使得系统功能超过了传统方案,其稳定性也大大加强,同时避免了软件控制中存在的不稳定因素。对倒车雷达生产商来说,不仅能降低开发和生产成本,对整机的可靠性也有了很大提高。所以我们有理由相信用于倒车雷达测距的单芯片方案会逐步替代传统的单片机方案。

评论