面向计算体系结构的电机控制

起点
让我们介绍一种在我们应用场景中处于中心位置的永磁同步电机,即 PMSM。PMSM 有很多种外形和体积,适合很多种应用,从开关门到机器人手术工具关节等。在这一领域中,它得到了广泛的应用,这是因为其固有的可靠性、低成本,在我们的应用中,经过适当的控制,可以实现高精度和高效率。实际上,应用的要求越来越高,PMSM 支持您降低机电设计的复杂性,在软件中实现复杂的功能。
PMSM 机械和电气特性非常简单 (图 1) 。转子正如其名称所示,是永磁体。通常有三个定子绕组,在电机中均匀的 120 度角分布。真正的诀窍在于绕组的不同:转动密度是围绕定子呈正弦分布,因此,绕组实际上在边缘上相互重叠。在绕组合适的相位上应用正弦电流,您能够建立与转子场角度垂直的旋转磁场,从而在转子上高效的产生扭矩。
控制 PMSM 并不是高科技。一个简单的 MCU 使用查找表和插值来生成所需的驱动电流时变正弦信号,为绕组提供电流。如果算法正确,绕组会产生电机旋转磁场,转子随之转动。虽然起步有些复杂,但毕竟完成任务了,对吧?不完全是这样。
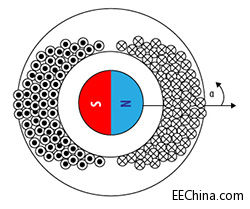
图 1. PMSM 截面
现场定位控制
开环控制的问题总是很复杂。启动电机,特别是有负载的情况,会比较难,效率也不高。开环控制器的响应并不能很好的适应负载扭矩或者速度命令的变化,无法抑制振动。出于通常的考虑,反馈控制系统工作起来会更好一些。
问题是要控制什么。很明显,我希望控制转动角度 — 在某些应用中,旋转速度。我们必须通过控制产生旋转磁场的三个绕组电流来完成这一工作。对此最好的方法是,在业界已经应用的多路步进,即,线程定位控制 (FOC) (图 2) 。
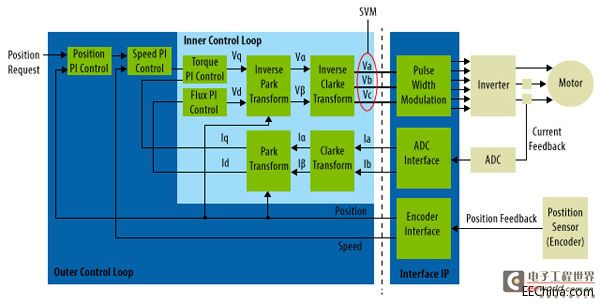
图 2. 驱动结构图
第一,我们采集来自转轴编码器的转子位置采样,以及三个绕组中两个绕组的电流采样。由于一些很好的数学算法,我们并不需要所有三个绕组电流。这些采样告诉我们转子以及定子旋转磁场的瞬时位置和滞后速度。我们的工作是控制转子的速度和位置,这通过控制定子绕组的电流大小来实现,同时还要让旋转磁场比转子磁场超前 90 度。
通过两个简单的变换,我们很容易完成这一工作。Clarke 变换将两个定子绕组的电流采样 — 它们分开 120 度,映射到一对正交矢量上。矢量的方向相对于定子是固定的,当然,其矢量和是旋转磁场矢量。Clarke 变换只需要将电流值乘以常数,加上乘积 — 简单的乘累加运算。
第二种变换是 Park 变换,将这两个正交矢量映射到转子参考的旋转帧中。一个矢量与转子磁场对齐,另一个 — 正交矢量,角度与其垂直。Park 变换比较难处理。在进行矢量乘法把矢量变换成转子参考帧之前,它使用瞬时转轴位置来计算 sin(θ) 和 cos(θ) 系数。
现在,我们可以控制信号。我们把与转子对齐的矢量保持为 0,表示定子磁通量没有对转子产生扭矩。我们使用正交分量来控制转子位置和速度,定子磁通量实际上产生了扭矩。
例如,控制器会处理所需位置的输入,将其与传统分立时间比例积分 (PI) 控制电流的实际转轴角度相对比,产生误差信号,输出至 FOC 模块。FOC 模块然后会把这一误差信号送入正交扭矩信号中,使转子旋转。模块会应用 Park 反变换,把扭矩映射回定子参考的固定帧,然后,通过 Clarke反 变换,把扭矩信号映射到电流中,送入三个绕组。这样就改变了定子绕组所需位置和所需速度输入激励信号,旋转定子磁场,使转子处于所需的角度上。

评论