车载导航系统硬件电路设计与实现

1 车载导航系统工作原理
车载导航系统的主要功能是定时采集陀螺正交编码信号、加速度计的输入和里程计输入信号,并对采集的数据进行必要的处理,以实现导航解算。同时将采集数据通过RS422总线和CAN总线发送至地面监测设备;并通过RS422总线接收相关的命令及参数。该系统结构如图1所示。
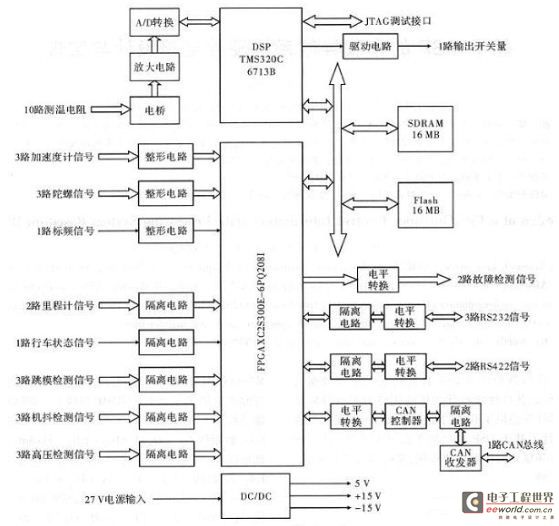
图1 车载导航系统结构框图
2 系统硬件设计
2.1 处理器及存储器设计
车载导航系统电路采用TI公司的TMS320C6713B-A200作为DSP,该DSP芯片标称主频为200 MHz,工作在160 MHz主频时DSP处理能力为1600 MI·s-1/1 200MFLOPS。使用40 MHz的晶振作为DSP的时钟输入,经内部锁相环倍频后作为DSP工作的时钟,使用一片TPS70345电压调整器为其提供3.3 V的IO电压和1.2 V的内核电压;采用一片容量为16 MB的MT48LC4M3282TG-7IT芯片作为SDRAM的存储器,存储器直接接入DSP的EMIF总线上,SDRAM芯片的地址线BA1、BA0和A11~A0接DSP芯片的EA15~EA2,数据线D31~D0接ED31~ED0。FlashRom芯片的地址线A22~A0接DSP芯片的GP13~CP11和EA21~EA2,数据线DQ15~DQ0,接ED15~ED0,初始化时GP13~GP13个引脚的状态为高,SDRAM芯片的片选信号接DSP芯片的CE0;采用一片容量为16 MB的S29GL128N10TFIR1芯片为FlashRom存储器,FlashRom芯片的片选信号接DSP芯片的CE1。之所以DSP芯片的CE1接到FlashRom的片选上,是因其引导方式采用从ROM加载,BOOT程序存放在FlashRom存储器中。存储器的读写信号均接到DSP芯片的AWE信号上。DSP通过EMIF总线接口访问外部存储器,可通过操作寄存器控制对外部存储器的访问,简化了电路的设计。
2.2 电源设计
车载导航系统输入电源为27±9 V,经MHF+28515将24 V转换为+15 V和+5 V的电压,MHF+28515的输入电压范围为16~48 V,输出功率15 W,其中+5 V电压输出最大功率为7.5 W,电流1 500 mA,+15 V电压输出功率最大分别为5 W,电路330 mA。由于车载导航系统电路自身+5 V电源使用的电流约为1000 mA,所以能提供+5 V,电流>140 mA的输出给外部使用,为满足系统中各部件的供电要求,设计了车载导航系统供电系统。
MHF+28515输出的+5 V电源为整个模块提供数字电源,其中CAN总线协议芯片等部分+5 V工作的芯片直接使用该电源;其他电路使用经转换后的电源其处理方法包括:通过电压调整器TPS70345将+5 V电源转换成3.3 V和1.2 V电源,其中3.3 V供DSP外围电路及SDRAM、Flash等芯片使用,1.2 V供DSP内核使用;通过电压调整器TPS70351将+5 V电源转换成3.3 V和1.8 V电压,其中3.3 V供FPGA外围电路、光耦等芯片使用,1.8 V供FPGA内核使用;通过两个DC/DC模块NKE0503将+5 V电源转换成3.3 V电压,一个供RS422隔离电路中的MAX3490及光耦使用,另一个供RS232隔离电路中的MAX3232及光耦使用。通过一个DC/DC模块NME0505将+5 V电源进行隔离,供MAX481、CAN总线收发器和其通路上的光耦使用。MHF+28515输出的±15 V电源为整个模块提供模拟电源,其中+15 V电压通过三端稳压器JW78M05将电压转换成+5 V模拟电压,供LM3940IMP和REF196使用;+5 V模拟电压通过LM3940IMP转换成3.3 V模拟电压,为运放供电;+5 V模拟电压通过REF196转换成3.3 V模拟电压,为电桥供电;+15 V和-15 V电压则是为运放OP497供电。
2.3 输入信号
车载导航系统电路输入信号有3路加速度计信号、3路陀螺信号、两路里程计信号、两路标频信号、一路行车状态信号、9路状态检测信号和10路测温信号。
加速度计信号的信号形式为可逆脉冲,幅值TTL,满量程为256 kHz,经3路16位计数器计数,上升沿触发,中断5锁存,加速度计信号采用RC滤波和带施密特触发输入的反向器进行整形处理,然后通过74LVC244进行电平转换后引入FPGA中。
陀螺信号的信号形式为正交编码信号,幅值高电平4~5 V,低电平0~0.8 V,电流≤8 mA,频率≤1.5 MHz,相位差90°±20°,经3路16位计数器计数,上升沿触发,中断5锁存,陀螺信号也与加速度计信号相同,进行整形处理。而标频信号频率为128 kHz,幅值TTL,也信号需整形。因此,标频信号的处理形式和加速度计信号处理方法相同。
里程计信号包括两路里程计信号、1路行车状态信号和1路里程计地,幅值12 V,驱动能力30 mA,需光耦隔离,设置两个16位计数器和1位状态寄存器,分别记录里程计脉冲输入和状态信息,里程计脉冲上升沿触发计数,中断5锁存;要求行车状态信号State可用命令使能和禁止,使能状态下当State=1时,里程计信号加法计数;当State=0时,减法计数;禁止状态下里程计信号加法计数,里程计信号先经RC滤波电路和保护二极管,然后经光隔进入FPGA。
状态检测信号包括3路跳模检测信号、3路高压状态信号和3路机抖状态信号,信号形式均为开关量,幅值为TTL,机抖状态信号和高压状态信号需光耦隔离。跳模检测信号处理形式和参数选择与加速度计信号相同;高压状态信号和机抖检测信号处理形式则与陀螺信号一致。
测温信号包括10路测温电阻输入和1路测温电阻输入公共端,温度范围在-45~+70℃,测温电阻与模块上3个高精度电阻组成电桥,按照电桥工作原理,桥臂电阻的阻值应小于测温电阻的最小值,并应当考虑一定的冗余,温度系数的计算公式为R0×3.85×10-3,其中R0是0℃电阻,由于采用了高精度电阻和12位的AD,A/D转换精度>0.5 ℃,可用多路开关实现。电桥两臂中点分别接入运算放大器进行跟随处理,再经后级放大后由A/D转换芯片采集温度测试结果,A/D转换芯片采用串行接口芯片,与DSP的McBSP1接口连接,该芯片分辨率为12位,并具有10 μs的转换时间及最大11路的A/D输入。

评论