改进的D-S理论在ETC系统中的应用研究

1 D-S 证据理论概述及改进
Dempster-Shafer 证据理论(简称D-S 证据理论)源于20 世纪60 年代Dempster 在多值映射方面的工作,他将证据的信任函数与概率空间的概率的最大最小值相关联,构造了不确定推理模型的一般框架。此后Shafer 又在此基础上进行了扩展,形成了能够处理不确定、不精确、不完整信息的证据理论。它凭借其能够表示“不确定性”、“未知”等概念的优点,在数据融合中得到广泛重视。
1.1 D-S 证据理论概述
设有一个有限假设空间,Θ为空间中所有命题的穷举集合,D-S 理论用“识别框架(Frame. of Discernment)”描述构成整个假设空间的所有命题的集合Θ,识别框架中的各元素要求互相排斥,而集合中的命题称为识别框架的原命题。定义1 设Θ为给定识别框架,Ω=2Θ为Θ的幂集,则函数m:Ω→[0,1],在满足下列条件:
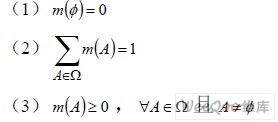
时,称m 为Ω 上的基本概率分配;?A∈Ω,m(A)称为基本概率分配函数(BPA),m(A)≥0的命题称为证据的焦元。
定义2 设Θ 为一识别框架,m(A)为Ω 上的基本概率分配函数,满足下列的函数称为信任函数:
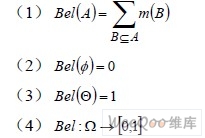
其中A 的信度函数为A 中每个子集的信度之和,Bel(A)表示对A 的总的信任程度,亦为可信度。
定义3 Bel 为给定信任函数,有一函数PL:

,则PL为A 的似然函数。即:

虽然D-S 证据理论在实际得到广泛的追捧,但在应用中人们发现其自身也存在一些不足和缺点,特别是在高冲突证据组合的时候会导致合成的结果违背直觉。前人如Zadeh 和Yager、Smets 他们也在这个问题上做了许多详细的研究,并提出了针对性的意见及妥善的改进方法。可惜随着科技的进步这一问题终究没有得到很好的解决。
1.2 D-S 证据理论的改进
D-S 的合成法则如下:
m1 与m2 是识别框架Θ 的两个独立证据,Ω 为Θ 的幂集,A、B 为幂集中的元素,则这两个证据组合后得到的组合证据为:

其中

为归一化常数:
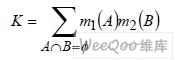
它的作用就是避免在合成时将非零的概率赋给空集Φ。
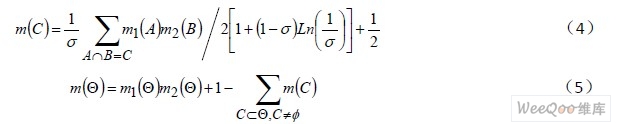
虽然D-S 理论有诸多优点,但在实际的应用中却不是令人满意,往往有时与直觉相违背,主要的原因是存在证据冲突,这是不可小觑的问题。所以做了如下的改进,取冲突权值为归一化常数的对数:

如果上述两个证据之间不存在冲突,则Cov(Bela,Belb)=∞;如果证据间完全冲突,则Cov(Bela,Belb)=0。在充分认识到证据间的冲突下,令σ=1-K 为冲突因子,当σ=0 时证据之间不存在任何冲突,当σ=1 时证据之间完全冲突,那么对D-S 的合成法则改进如下:
当融合的证据信息多于两个以上时,σ1,σ2,…,σn 为各个证据之间的冲突因子,则有:

评论