声纳浮标对空中声源干扰的抑制方法研究

航空反潜是重要的反潜手段之一。目前航空反潜平台使用的声学搜潜设备主要有吊放式声纳和声纳浮标,其中声纳浮标体积小,可携带数量多,效率高,布放和使用方便,与其他搜潜设备兼容性好,被广泛应用在各种航空反潜平台上。近年来随着水听器技术和信号处理技术的发展,声纳浮标在作用距离,弱信号检测能力以及定位精度等方面均有较大提高。但是反潜飞机作为空中声源,其噪声与潜艇的辐射噪声在频率特性方面非常相近,当反潜飞机低空飞行或悬停时,其辐射噪声会透过海面在海水中传播,具有弱信号探测能力的声纳浮标容易受到其干扰。
本文假设存在空中噪声干扰时,以采用单矢量水听器的声纳浮标为应用平台,通过自适应信号处理技术抵消空中噪声干扰。以最小均方误差(LMS)准则为基础,提出两种自适应抵消空中噪声的方法,并通过仿真对比研究两者性能差异。
1 存在空中噪声时声纳浮标的方位估计
以具有典型空中噪声特征的直升机为例,其噪声会对浮标的探测产生干扰,原因在于潜艇的水下辐射噪声与直升机噪声特点相近,潜艇噪声包括机械噪声、螺旋桨噪声和水动力噪声三大类,也是由连续谱噪声和主要集中在低频段(小于1 kHz)的非连续线谱分量所组成,线谱基频主要集中在1~100 Hz频段内。
对存在直升机噪声干扰的方位估计进行仿真分析。
仿真1:直升机方位50°,辐射噪声为50~800 Hz的连续谱,叠加基频为65 Hz的8根谐波簇线谱。环境噪声为高斯白噪声,水下干噪比为0 dB.目标方位270°,辐射噪声由基频为45 Hz 的12 根谐波簇线谱,叠加10~600 Hz 的连续谱组成,水下信噪比为0 dB.积分时间为1 s.
结果表明浮标对目标的方位估计有偏差,由干扰和目标的声能流合成方位,且估计结果偏向能量高的一方。
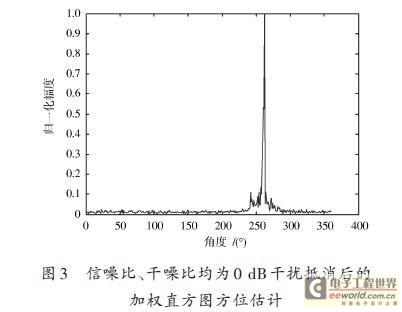
由于目标和干扰信号中都具有较强的线谱分量,矢量水听器可以采用直方图和加权直方图法进行目标方位估计,估计结果如图1,图2所示。
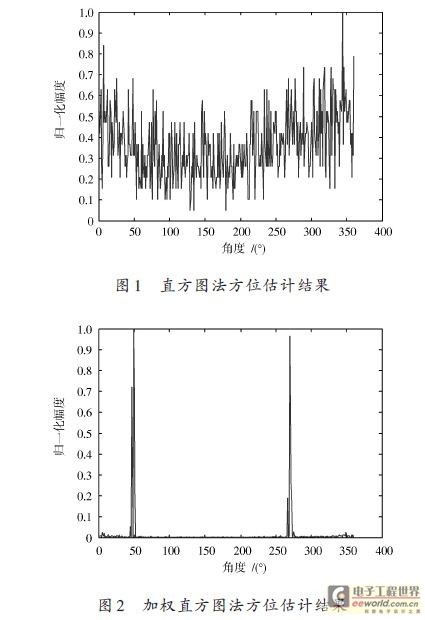
由图1,图2可知,当有多个相干声源存在时,若连续谱频带大部分重合,则直方图法的方位估计结果受干扰影响比较大,不能估计目标方位。为突出线谱分量的作用,采用加权直方图法时,只要各声源辐射噪声的线谱分量不完全重合,矢量水听器则可实现多目标的方位估计,但不能识别目标和干扰。
2 空中噪声干扰自适应抵消
滤波器是抑制噪声干扰非常有效的方法。由于潜艇和空中平台噪声在频带上大部分重合,因此不适合采用参数固定的带阻滤波器抑制噪声干扰。本文选择基于LMS法的自适应干扰抵消器抑制空中噪声。
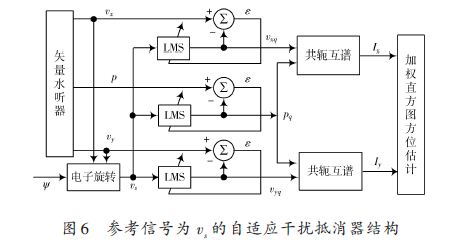
自适应干扰抵消需要一个与噪声或与目标信号相关的参考输入,本文以直升机噪声为干扰源,分别以直升机空中噪声和以组合振速为参考输入进行自适应抵消。
2.1 空中平台噪声为参考信号
在浮标的水上部分加装一个矢量微音器,实时采集空中噪声,水下部分用矢量水听器接收潜艇和空中平台的水下噪声。将微音器接收的空中噪声信号作为参考输入。
仿真2:假设二维空间中水下目标位置(-100 m,-500 m);空中平台为直升机,位置(500 m,300 m);设定直升机空中噪声的信噪比相对于它在水中的信噪比高15 dB.其他条件同仿真1.
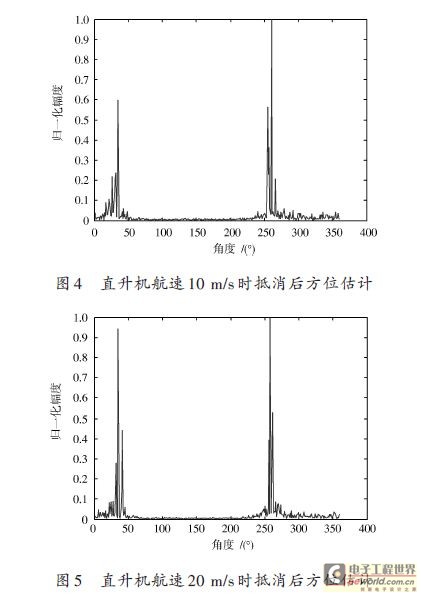
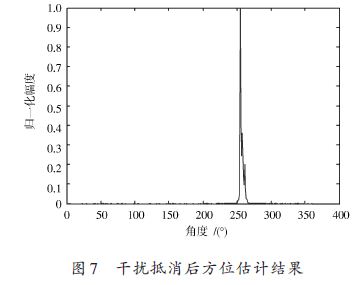
信噪比、干燥比均为0 dB 干扰抵消后的加权直方图方位估计如图3所示。
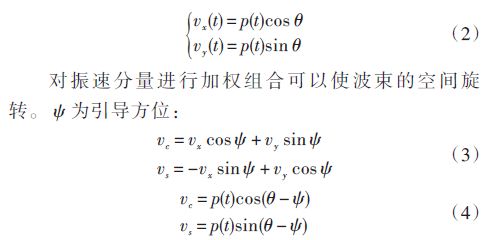
由图3 可知直升机静止时此方法可有效抑制其噪声。若直升机分别以10 m/s和20 m/s的速度飞行,飞机位置不变,航向与矢量水听器x 方向夹角为180°,水下目标航速5 m/s,航向与矢量水听器x 方向同向,空中声速334 m/s,海水中声速1 500 m/s.其他条件同仿真2,结果如图4,图5所示。



评论