深度解析瑞士LSRO医疗机器人实验室的构造

医疗机器人已经成为外科手术界常被谈到的话题,从关节式的臂式笨拙工业机器人,到远程操控的机器人出现,技术不断更迭,而未来单孔手术机器人系统和新型操控方式代表了新一代手术机器人的发展方向。今天我们要为你介绍的是一位欧洲医疗机器人大咖——瑞士技术科学院(SATW)院士、瑞士洛桑理工学院(EPFL)教授——Hannes Bleuler。
本文引用地址:https://www.eepw.com.cn/article/201610/311389.htm深厚的机器人科研背景

欧洲医疗机器人先锋:Hannes Bleuler教授
Hannes Bleuler教授就职于享誉欧洲工科领域的瑞士洛桑理工学院(EPFL),从1995年开始,就致力于机器人等方向的科学研究。在此之前,他还在东京大学做了4年的智能机电学副教授。
Bleuler曾经主导欧洲宇航局的手术机器人项目,是“欧洲蓝脑计划”的主要参与方,并曾在数十项由加拿大自然科学基金委、美国国家航空航天局(NASA)、瑞士国家科学基金委(SNSF)、欧盟第七科技框架计划(FP7)等组织的重大科研项目中作出贡献。他还是IEEE顶级期刊的审稿人,在手术机器人、触觉反馈等领域发表了不少文章,有200多篇论文被发表在Nature等国际著名杂志上,并且出版了3本著作,总计引用次数5521。
领导顶级LSRO机器人实验室

LSRO机器人系统实验室
Bleuler教授在洛桑理工学院领导了一个叫LSRO(全称The Laboratoire de Systèmes Robotiques,机器人系统实验室)的25人团队实验室,团队研究方向非常多样,包括生物医学机器人、触觉学、微型机器人、磁共振兼容设备、纳米技术等。而他们最为关键的方向是“触觉功能的医疗机器人”,研究团队对机器人动作的精准控制非常感兴趣,而这正是对精度要求极高的外科医学所需求的。
团队目前的项目也是多种多样,包括为欧洲南部天文台研制的光纤延迟线、用于铯束原子钟的静电马达等。在医学方面,LSRO曾经做过以及现在正在进行的项目有:可用于腹腔镜检查、宫腔镜检查、影像诊断学、结肠镜检查的触觉反应微创手术模拟器;功能磁共振成像兼容的触觉设备;下颌骨生成;神经外科手术的显微操纵器;并联机器人设计等。
人机交互的医学应用:推动医疗手术机器人升级
Bleuler教授和他的团队致力于研究人机交互的机电整合系统,而在这些研究中,很大一部分都运用在了生物医学的领域,尤其是手术方面。下面我们对团队一些突出的医疗机器人技术和专利做一个介绍。
两大 FP-7项目
实验室有两个项目是属于欧盟第七科技框架计划(FP7)——SAFROS项目和ARAKNES项目。SAFROS项目的目标包括:柔软器官的建模和标定、发展实时三维成像显示技术、手术规划、手术模拟、手术医生训练、研发有触觉反馈和立体视觉的手术界面。ARAKNES项目的目标则是要整合传统开放式手术、微创手术以及机器人手术的优点,研发出一个能适用于各种类型的手术场景的新型手术系统,也就是说它能针对不同患者的情况,既能进行开放式手术,也能通过机器人做远程的腔内手术。
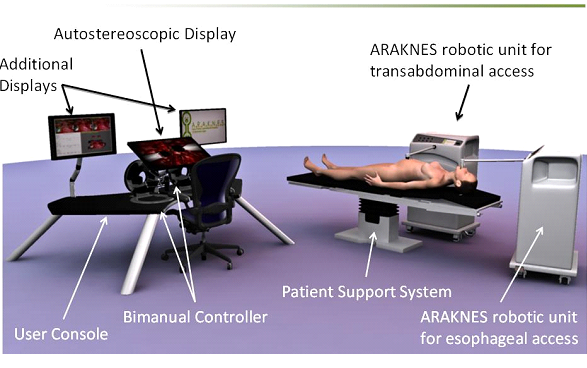
ARAKNES项目的多功能新型手术系统
专利Maestro-AF导管
经皮导管消融将成为心房颤动疾病方面一个大有前途的治疗手段。实验室研发的Maestro-AF导管则是利用“消融导管”和“护送导管”的磁性耦合来突破了当前技术的主要限制,从而更好地实现导管的连续的机械控制。Maestro-AF导管还有一个更强大的功能:可以提供机体组织的温度,从而帮助手术作出更好的决策。
LSRO实验室的此项发明已经申请了专利,并通过实验验证取得了良好的效果。
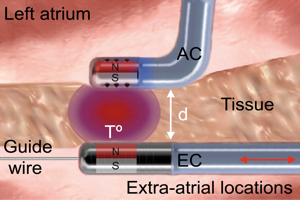
传统的导管 VS. Maestro-AF导管






评论