深挖智能汽车设计要素,你知多少?
多款GPS接收器可指定2组敏感值:撷取灵敏度(Acquisition sensitivity)与信号追踪灵敏度(Signal tracking sensitivity)[9].如字面上的意思,撷取灵敏度为“接收器可进行定位的最低功率强度”。相反而言,信号追踪灵敏度为“接收器可追踪各个卫星的最低功率强度”。
以基本概念而言,我们可将灵敏度定义为“无线接收器产生所需最低位错误率(BER)的最低功率强度”。由于BER与载波噪声(Carrier-to-noise,C/N)比息息相关,因此灵敏度一般均是透过已知的接收器输入功率强度,得出所需的C/N值而定。
请注意,各组卫星的C/N值,均可直接透过GPS接收器的芯片组而得。目前有多种方式可计算出此项数值,而某几款接收器却是计算发讯日期(Messagedate)而得出约略值。当透过高功率测试激发进行模拟时,新款GPS接收器一般均可得到54~56dB-Hz的C/N峰值。由于即便是万里无云的晴空,GPS接收器亦可能得出30~50dB-Hz的C/N值;因此该C/N限值尚属于正常范围之内。一般GPS接收器均必须达到最小C/N比值,才能符合28~32dB-Hz的定位(撷取灵敏度)范围。因此,某些特殊接收器的灵敏度可定义为“接收器产生最低定位C/N比值所需的最低功率强度”。
理论上来说,单一卫星或多组卫星测试激发均可测量灵敏度。而实务上来看,由于已可轻松且稳定发出所需的RF功率,因此往往是以单一卫星模式进行测量作业。依定义而言,灵敏度为接收器回传最小C/N比值的最低功率强度。在接下来的讨论中,则可发现接收器的灵敏度甚为依赖RF前端的噪声指数.
在等式9中,灵敏度可表达为C/N比值与噪声指数的函式。举例来说,定位追踪所需的最低C/N为32dB-Hz,则噪声指数为2dB的接收器将具有-140dBm(-174+32+2)的灵敏度。然而,当单独测试基带(Baseband)收发器时,往往忽略了第一组LNA.一般接收器为下图所示:
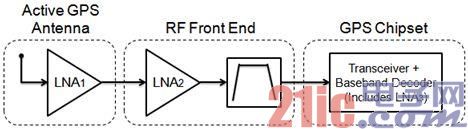
图14.GPS接收器往往串联多组LNA[6]
如图14所示,一般GPS接收器均是串联了多组LNA,为GPS信号提供高效率的增益。如先前所说,第一组LNA将决定整组系统的噪声指数。图14中,我们先假设LNA1具有30dB的增益与1.5dB的NF.此外,我们假设整个RF前端具有40dB的增益与5dB的NF.接着请注意,由于LNA2之后的噪声功率将超过-174dBm/Hz的热噪声(Thermal noise),因此带通(Bandpass)滤波器将同时减弱信号与噪声。如此将几乎不会对SNR造成任何影响。最后,我们假设GPS芯片组可产生40dB的增益与5dB的噪声指数。即可计算出整组系统的噪声指数为:

图15.线性与对数模式的增益与NF
根据上列计算,即可找出接收器的整体噪声因子:
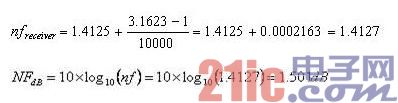
等式10与11.第一组LNA的噪声系数将影响接收器的噪声系数
透过等式10与11来看,若GPS接收器连接已启动的天线,则其噪声指数约可达1.5dB.请注意,我们已经先忽略了相关噪声指数等式中的第三项条件。由于此数值极小,基本上可将之忽略。
在某些案例中,GPS接收器的作业天线会搭配使用内建LNA.因此测试点将忽略接收器的第一组LNA.如此一来将透过第二组LNA得出噪声指数,且其往往又大于第一组LNA的噪声指数。若将LNA1移除,则可透过下列等式得出LNA2的噪声指数。

等式12与13.移除第一组LNA所得到的接收器噪声指数
如等式12与13所示,若将具备最佳噪声指数的LNA移除,则将大幅影响整组接收器的噪声指数。请注意,虽然此“常见”GPS接收器噪声指数的计算范例纯为理论叙述,但仍具有其重要性。由于接收器所呈现的C/N比值,实在与系统的噪声系数密不可分,因此系统的噪声系数可协助我们设定合适的C/N测试限制。
单一卫星灵敏度测量
在了解灵敏度测量的基本理论之后,接着将进行实际测量的各个程序。一般测试系统均是透过直接联机,将模拟的L1单一卫星载波送入至DUT的RF通讯端口中。为了获得C/N比值,我们将接收器设定透过NMEA-183协议进行通讯。在LabVIEW中,则仅需串联3笔GSV指令,即可读取最大的卫星C/N值。
根据GPS规格说明,单一L1卫星若位于地球表面,则其功率应不低于-130dBm[7].然而,消费者对室内与户外的GPS接收器使用需求,已进一步压低了测试限制。事实上,多款GPS接收器可达最低-142dBm定位追踪灵敏度,与最低-160dBm信号追踪。在一般作业点(Operatingpoint)时,大多数的GPS接收器均可迅速持续锁定低于6dB的信号,因此我们的测试激发则使用-136dBm的平均RF功率强度。
若要达到最佳的功率精确度与噪声水平(Noise floor)效能,则建议针对RF矢量信号发生器的输出,使用外接衰减。在大多数的案例中,40dB~60dB的外接衰减,可让我们更接近线性范围(功率≥-80dBm),妥善操作产生器。由于各组接收器的定位衰减(Fix attenuation)均不甚固定,因此必须先行校准系统,以决定测试激发的正确功率。
在校准程序中,我们可考虑:1)信号的峰值平均比(Peak-to-average ratio)、衰减器各个部分的差异,还有任何接线作业可能的插入损耗(Insertionl oss)。为了校准系统,应先从DUT切断联机,再将该联机接至RF矢量信号分析器(如PXI-5661)。
PartA:单一卫星校准
当执行灵敏度测量时,RF功率强度的精确性,实为信号发生器最重要的特性之一。由于接收器可获得0数字精确度的C/N值(如34dB-Hz),因此生产测试中的灵敏度测量可达±0.5dB的功率精确度。因此,必须确保我们的仪控功能至少要达到相等或以上的效能。由于一般RF仪控作业是专为大范围功率强度、频率范围,与温度条件所设计,因此在执行基本系统校准时,测量的可重复性(Repeatability)应远高于特定仪器效能。下列章节将进一步说明可确保RF功率精确度的2种方法。















评论