深挖智能汽车设计要素,你知多少?
方法1:单一被动式RF衰减器:
虽然使用外接衰减,是为了确保GPS信号产生作业可达最佳噪声密度,但实际仅需20dB的衰减,即可确保噪声密度低于-174dBm/Hz.当使用20dB的固定板(Pad)时,仅需将仪器设定为超过20dB的RF功率强度即可。为了达到-136dBm的目标,仪器应程序设计为-115dBm(假设1dB的连接线插入损耗),且将20dB衰减器直接连至产生器的输出。则所达到的RF功率将为-136dBm,但仍具有额外的不确定性。假设20dB的固定板具有±0.25dB的不确定性,且RF产生器亦于-116dBm具有±1.0dB的不确定性,则整体的不确定性将为±1.25dB.因此,虽然方法1最为简单且不需进行校准,但由于系统中的多项组件均未经过校准,因此可能接着发生不确定性。请注意,造成仪器不确定性最主要的原因之一,即为电压驻波比(Voltage standing wave ratio,VSWR)。因为被动式衰减器是直接连至仪器的输出,所以反射回仪器的驻波即为实际衰减。由于降低了功率的不确定性,因此可提升整体功率的精确性。
请注意,此处亦使用高效能VNA确实测量被动衰减器。透过此测量装置,即可于±0.1dB的不确定性之内,决定所要套用的衰减。
方法2:经过校准的多组被动衰减器
校准RF功率的第二种方法,即是使用高精确度的RF功率计(高于±0.2dB的精确度,并最低可达-70dBm)搭配多款固定式衰减器。因为我们是以固定频率,与相对较小的功率范围操作RF产生器,所以可有效修正由产生器造成的任何错误。此外,由于被动衰减器是以固定频率进行线性动作,因此亦可校准其不确定性。在方法2中,主要即必须确保产生系统可达到最佳效能,且将不确定性降至最低。此高精确度功率计可达优于80dB的动态范围(往往为双头式仪器),进而确保最低的测量不确定性。
透过高精确度的功率计,即可使用3种测量作业进行系统校准:1种用于矢量信号发生器的RF功率,另外2种测量作业可校准衰减器。为了达到最佳的不确定性,则应设定系统所需的最少测量次数。若要达到-136dBm的RF功率强度,则可将RF仪器程序设计为-65dBm的功率强度,并使用70dB固定衰减(假设1dB插入损耗)。为了确实进行RF功率强度的程序设计作业,则可透过固定的Padding校准实际衰减。校准程序如下:
1)将VSG程序设计为+15dBm功率强度
可开启MeasurementandAutomationExplorer(MAX)并使用测试面板。透过测试面板以+15dBm产生1.58GHz连续波(CW)信号。
2)以高精确度的功率计测量RF功率
使用RF功率计,让功率达到仪器功率精确度规格的+14.78dBm(或近似值)之内。
3)附加70dB固定式衰减器(30dB+20dB+20dB)与任何必要的连接线
4)以高精确度的功率计测量RF功率
将功率计设定为最大平均值(512),以测量RF功率强度。此处的读数为-56.63dBm.
5)计算RF总耗损
若以+14.78dBm减去-56.63dBm,即可在整合了衰减器与连接线之后,确保产生71.41dB的功率耗损。请注意,多款衰减器往往具备最高±1.0dB的不确定性。因此测量所得的衰减可能最高达±3.0dB的变化。所以校准衰减器更显重要,确保已知衰减可达较低的不确定性。
根据衰减器与连接线的校准例程,即可确定所需的RF功率强度必须达到-136dBM.基于前述的71.41dB衰减,必须将RF矢量信号发生器设定为-58.59dBm的功率强度。若要确认程序设计过后的功率无误,则可依下列步骤进行:
6)直接将功率计附加至RF矢量信号发生器
并移除所有的衰减器与连接线。
7)将RF产生器设定必要数值,使其最后功率达到-136dBm.
而程序设计的数值应为-58.59dBm,即由-136dBm+71.41dB而得。
8)以功率计测量最后功率。
请注意,所测得的RF功率,将因仪器的功率精确度而有所不同。即使测得-58.59,则实际结果亦将因仪器的不确定性而产生些许变化。
9)调整产生器功率直到功率计读出-58.59dBm
虽然RF产生器可于一定的容错范围内进行作业,但此数值不仅具有可重复性,亦可调整RF功率计进行校准,直到得出合适的数值为止。
透过上述方法,仅需3项RF功率测量作业,即可决定所需的RF功率。因此,假设测量装置具有±0.2dB的不确定性,则可得出–136dBm的功率不确定性将为±0.6dBm(3x0.2)。
PartB:灵敏度测量
现在校准RF测量系统的功率之后,接着仅需进行RF产生器的程序设计,将功率强度设定足以让接收器回传最小的C/N.虽然用于测量灵敏度的RF功率将因接收器而有所不同,但是接收器C/N与RF功率的比值,将呈现完美的线性关系。在我们的测试中,可假设所需的C/N为28dB-Hz以进行定位。透过等式12,即可得出接收器C/N比值与噪声指数之间的关系。
假设卫星功率稳定,则可发现由接收器回报的C/N比,几乎就等于接收器的噪声指数函式。下表显示可达到的多样C/N比值。
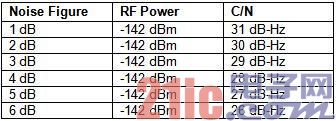
图16.C/N为噪声指数的函式
一般来说,接收器上的GPS译码芯片组,将得出定位作业所需的最小C/N比值。然而,又必须透过整组接收器的噪声指数,才能决定目前功率强度所能达到的C/N比值。因此,当测量灵敏度时,必须先了解定位作业所需的最小C/N比值。
其实有多种方法可测量灵敏度。如上表所示,RF功率与灵敏度具有直接相关性。因此,可根据现有的灵敏度功率强度,测量接收器的C/N比值;亦可根据不同的RF功率强度,得出系统灵敏度。
为了说明这点,则可注意RF信号功率与GPS接收器C/N比值,在不同功率强度之下的关系。下方测量作业所套用的激发,即忽略了第一组LNA而进行,且接收器的整体噪声指数约为8dB.而图17显示相关结果。

图17.接收器的C/N比值为RF功率的函式
如图17所示,此测量范例的RF功率与C/N比值,几乎是呈现完整的线性关系。而若使用高输入功率模拟C/N比值,将产生例外情况;接收器报表将出现可能的最大C/N值。然而,因为在任何条件下,进行实验的芯片组均不会产生超过54dB-Hz的C/N值,所以这些结果均属预期范围之中。















评论