数字微流控生物芯片的电极管脚控制信号处理

微流控芯片实验室又称为微流控(Microfluidics)芯片、芯片实验室(Lab-on-a-Chip,LoC)或生物微机电系统(bio-MEMS),基于连续流体的微流控生物芯片又称为数字微流控生物芯片(Digital MicrofluidicBiochip,DMFB)。由于DMFB中控制电极的独立控制引脚数量是重要的成本动因,电极以电驱动的形式连接到控制引脚,许多典型的生物芯片用直接寻址的方式来实现电极的控制,每个电极连接一个专用的控制引脚,因此,其能独立被激活,这种方法可使液滴自由的操纵,但对于一个实际的DMFB其需要过多的控制引脚,显著地增加了产品的制造成本。对于大规模的DMFB,在确保测试完成时间的情况下,尽量减少控制引脚的数量,对于未来的发展具有重要的意义。
本文引用地址:https://www.eepw.com.cn/article/201610/309165.htm1 电极管脚控制信号处理
1.1 DMFB基本原理
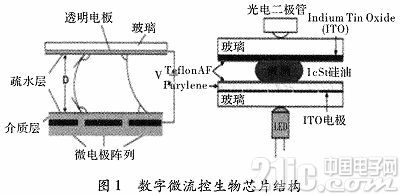
数字微流控生物芯片利用介电润湿的原理在二维的电极阵列中操纵和移动纳升级的离散液滴。如图1所示,数字微流控生物芯片的基本单元包括两个平板和夹在平板中间的填充,液滴在填充介质内运行。底板包含一个单独控制的有图案的电极阵列,顶板覆盖了一层连续的地线。通过改变沿着电极的一个线性阵列的电势,液滴可以沿着电极的一条线移动。可通过调整控制电压(0~90 V)来控制液滴的速度,且液滴能最高以20 cm/s的速度移动,基于这一原理,液滴能自由移动到2维阵列的任何位置,而无需微型泵和微型阀。
1.2 DMFB相关研究
为减少控制引脚的数量,2006年Xu Tao提出了用阵列分区和详细的引脚分配的方法来减少控制引脚的数量,然而这种方法在每个分区中至少需要5个控制引脚,对于包含多重液滴混合的分区,会用到直接寻址的方法,这种方法的阵列设计仅限于目标生物流体应用,且仅限于控制引脚数的减少而不能确保完成时间。Srinivasan又提出了对于焊接的电润湿生物芯片用一个流体路径的多相位总线来使得控制引脚数最小,对一个传输总线只需n个控制引脚,而不需考虑其所包含电极的数量。尽管多相总线的方法可用来减少控制引脚的数量,但其只适用于一维阵列。另一个替代的方法是S.K.Fan等人提出的行和列的寻址,被称为“交叉引用”驱动方案,但由于电极的干扰,处理多于两个液滴的同时移动的设计非常的复杂,对于高通量的应用,最终产生的液滴移动的序列化是一个严重缺陷。并交叉引用设计需要一个特定的电极结构,会导致制造成本的增加。
根据上述方法所存在的不足,文中提出了一种优化方法,在根据液滴路由路径产生电极驱动序列后,根据一个控制引脚最对所能驱动的电极数,对驱动序列进行分区后比对,找出相互兼容的驱动序列,其可共用一个控制引脚。
2 控制信号优化处理方法
通常在一个特定的时间步,移动一个液滴的控制信号可用激活位“1”,释放位“0”或不影响位“x”来表示,“1”/“0”表示一个控制信号有一个相关的逻辑高/逻辑低的驱动电压值。“x”表明输入信号可用“1”或“0”表示,并对流体控制的调度无影响。最终串联输出称为电极驱动序列。
如图2所示,液滴按照图示的方向以类似扫描的方法从源极出发最终到达槽电极。
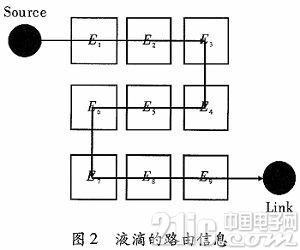
本文用“1”,“0”,“x”3个值表示一个生物鉴定的电极驱动序列,按照液滴的路由路径产生的电极驱动序列如表1所示。
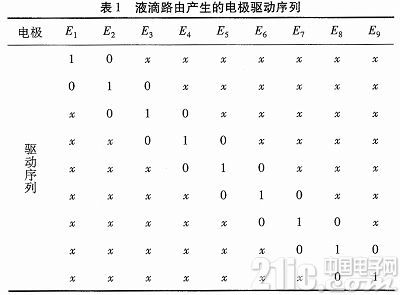
如表1所示,每个驱动序列均包含一些可用“1”或“0”来替代的“无影响”单元“x”,通过分配这些“无影响”单元,就可产生驱动序列相同的电极,即相互兼容的电极。例如:通过用“0”或“1”来替代“x”就可以使电极E1、E3、E5、E7、E9产生相同的电极驱动序列“101010101”,其可从同一个信号源产生,因此其可共用一个控制引脚,用这样的方法便可在一定程度上减少控制引脚的数量。
对于大规模的电极阵列产生的电极驱动序列也较多。在本设计中,由于液滴路由路径已知情况下,将会对液滴路由过程中产生的驱动序列进行分区,分区的规则是:先假设每个控制引脚最多能驱动x个电极,且以x的倍数进行分区(如x=5,则能以10来划分,使每个分区中有10个电极驱动序列),分区后通过对每个分区中的电极驱动序列进行比对来减少控制引脚的数量。具体步骤如下:
步骤1 据液滴的路由路径来获得每个控制引脚的电极驱动序列。
步骤2 假设电极的每个控制引脚最多所能驱动的电极的数量x,以x的倍数对产生的电极驱动序列进行分区。
步骤3 对每个分区的电极驱动序列进行比对,找到相互兼容的驱动序列,其可由同一个控制引脚来控制。
步骤4 每个分区比对完成后,查看产生的共用引脚数量是否小于x,若小于x则与其他分区中小于x的相比较,直到最终的共用引脚数量等于x或者是没有与其互相兼容的为止。例如:当x=3时,将由图4产生的电极驱动序列以6来进行分区,然后对于每个分区进行比对,会得到在前6个电极中E1=E3=E5,E2=E4=E6由于共用电极数等于3,则无需再与其他电极相比较。
表2是对图4的液滴路由产生的电极驱动序列进行x值的设定,然后分区产生的结果。
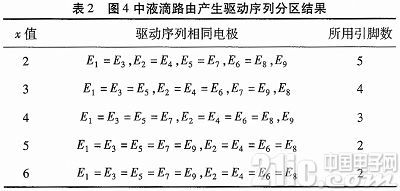
由表2中的数值可体现出,不同x值最终所减少的控制引脚数是不同的,根据x值的设定可更好的对产生的电极驱动序列进行分区,x值不仅对本身的生物芯片的性能有影响,也对最终控制引脚数的减少有一定的影响。文中的实验结果是对x取不同值最终产生的引脚分配进行比对,用最终产生的最优引脚数与其余方法相比对。由于本方法的应用是基于液滴路由路径已知的情况,故最终的阵列完成时问与直接寻址生物芯片的完成时间相同,确保了测试的完成时间。
3 实验结果
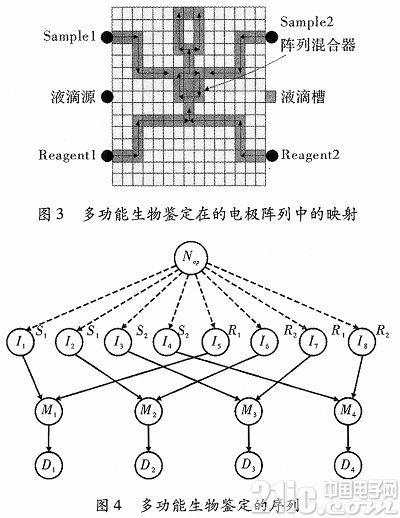
本文将所提出的优化方法引用到生物芯片的多功能生物鉴定当中,来验证方法的有效性。图3所示,多功能的生物鉴定映射到了一个15×15的数字微流控生物芯片上。对于每个样本和试剂均有两个液滴分发到阵列中,因此根据多功能生物鉴定的序列图所示:有4对液滴{S1,R1},{S1,R2},{S2,R1}和{S2,R2}执行到一起进行混合操作,最终进行4组检测操作。
根据上述8个液滴的路由过程,产生电极驱动序列后,图5所示为x分别取x=9,x=10,x=11,x=12再对序列进行分区,最终不同x值产生的引脚分配也不同。

如图5(a)所示,当x=12时最终引脚减少到了19个,相当于68%的减少率。图6是各种方案的比对结果,由图可看出在文献中提出的阵列分区方法最终用到了35个控制引脚,73 s的完成时间;在文献中提出的交叉引用方法,最终减少到了30个控制引脚,132s的完成时间。由上述结果可知,最终减少的控制引脚比其他方法多,在保证测试时间的情况下,达到了更好的结果,且实现了对引脚控制信号的优化处理。
4 结束语
本文主要研究了数字微流控生物芯片的电极管脚控制信号处理,考虑生物芯片有其一定的物理性质,每个控制引脚均会有一定的驱动能力,在此假设每个控制引脚最多能驱动x个电极,然后以x的倍数对产生的电极驱动序列进行分区,再寻找相互兼容的驱动序列,不同的x值最后产生的引脚分配也不同,在文中将x=12时的实验结果与交叉引用等方法相比较,实验结果表明,在确保测试完成时间的情况下,最终所用到的控制引脚比其他方法少,实现了对数字微流控生物芯片的电极管脚的控制信号处理,减少了芯片的制造成本,为未来数字微流控生物芯片的研究提供了参考。

评论