基于太阳能路灯的全方位跟踪太阳光系统的设计

摘要:基于太阳能路灯的全方位跟踪太阳光系统是利用自动控制和摇杆机构与皮带传动的机械设计原理,实现了太阳能路灯全方位跟踪太阳光的功能,保证太阳光始终垂直照射在电池板上,提高对太阳光的利用率。
本文引用地址:https://www.eepw.com.cn/article/201610/307163.htm1 研制背景
为了体现节能环保的理念,全国各地更注重对太阳能的利用,纷纷掀起了太阳能路灯的热潮,而传统的太阳能路灯无法实现对太阳光的全方位跟踪,对太阳光的利用效率低,基于这一现象设计出了太阳能路灯全方位跟踪太阳光系统。本文利用STC51单片以及光敏电阻模块实现自动控制,以及摇杆机构与皮带传动的辅助功能实现对太阳光的全方位跟踪。
1.1 太阳能路灯的发展现状及问题
目前我国的照明用电占全国的12%,2015年达到5 000亿千瓦时,相当于三峡水电站一年的发电量,太阳能路灯缓解了照明路灯的用电量,其能源来自于太阳,取之不尽,用之不竭。但传统的太阳能路灯利用太阳光的效率较低,造成太阳能的利用损失。因此实现太阳能路灯的全方位跟踪,提高太阳能的利用率。
2 全方位跟踪太阳光系统的设计总体方案
太阳能路灯全方位跟踪太阳光系统实现应用在路灯上的电池板对太阳光的全方位跟踪,即上下、左右跟踪太阳光。解决其技术问题所采用的技术方案是:利用光敏电阻控制两个电机,通过曲柄摇杆机构和皮带传动机构分别实现电池板对太阳光的上下、左右的跟踪。下面对太阳能路灯的全方位跟踪太阳光系统进行详细的介绍。
2.1 实现对太阳光的左右跟踪
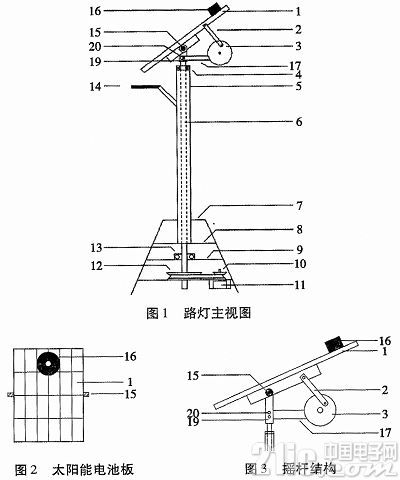
图1为太阳能路灯的全方位跟踪太阳光系统总体结构图,图2为太阳能电池板。电池板(1)与连接轴(15)连接处(21),连接轴(15)在电池板(1)下面穿过,路灯内杆(6)通过连接杆(19)和连接轴(15)与太阳能电池板(1)相连;由附图l可知路灯内杆(6)通过滑动轴承(4)与路灯外杆(5)相隔,以及通过底座第三支撑面(9)上的推力轴承(13)来支撑路灯内杆(6)以及太阳能电池板(1)的重力,保证了路灯内杆(6)能够转动;大皮带轮(12)和小皮带轮(10)以及皮带构成了皮带传动装置,通过步进电机(11)实现皮带传动最终实现路灯内杆(6)的转动,使太阳能电池板(1)实现对太阳光的左右跟踪。此外,底座第一支撑面(7)和底座第二支撑面(8)用来支撑路灯外杆(5)。
2.2 实现太阳光的上下跟踪
如图1螺栓(20)将支撑杆(17)、连接杆(19)和路灯内杆(6)相结合,固定了电池板(1)以及支撑杆(17);支撑杆(17)上面固定一个步进电机(22)与其相连的是圆盘(3),步进电机(22)的转动带动圆盘(3)的转动,使摇杆(2)发生传动,最终使太阳能电池板(1)绕着连接轴(15)转动,实现了太阳能电池板(1)对太阳光的上下跟踪。
3 总结
随着太阳能技术的发展,产业链上游利润率压缩,使光 伏组件的成本下降,全方位跟踪太阳光系统的设计使太阳光始终垂直照射在电池板上,提高了电池板对太阳光的利用率,使太阳能照明系统更加完美。全方位跟踪太阳光系统的照明路灯前景必然广阔,但现阶段我们还需要脚踏实地,稳步推进。






评论