太阳射电望远镜自动观测控制平台的研究与设计

目前,大型射电望远镜项目在各国都得到了普遍的重视,在射电望远镜的外形不断向着高精度、大口径发展的同时,人们对于射电望远镜的观测控制要求也越来越高,当下,射电望远镜的控制观测技术也已经开始朝着方便化、自动化、智能化方向前进。20世纪90年代,随着计算机技术和嵌入式系统的不断发展和完善,射电望远镜的控制也由手动控制转向计算机自动化控制,而且还会配有使人易懂的图形化界面,这使得射电望远镜的自动化控制程度越来越高,越来越精确。换句话说,观测者现在足不出户的坐在计算机面前就可以完成使用射电望远镜观测天体的任务。本文提出了一种太阳射电望远镜自动观测控制平台的整体解决方案。
本文引用地址:https://www.eepw.com.cn/article/201610/306931.htm1 太阳射电望远镜及其自动跟踪原理
1.1 太阳射电望远镜原理
太阳射电望远镜不同于一般的光学望远镜,它不是通过光线而是通过太阳发射出的无线电波来观测太阳。设在露天的抛物面反射天线,把它所接收到的从太阳上发出的微弱电波传到室内的接收机里,接收机再把电波放大并自动记录下来。根据这些记录,就可以研究太阳活动的情况,掌握太阳辐射能量的规律变化,来分析这些变化对地球的影响。
1.2太阳射电望远镜自动跟踪原理我们可以将太阳的移动视为匀速运动,太阳的运动是由两个方向上的运动合成的,即水平方向和垂直方向。因为太阳每天的运动轨迹不同,因此,我们使用了自动捕获其运动轨迹的方法,其方法为:手动按键,使望远镜随太阳一起运动,在此过程中,计算机可以记录和累加望远镜在水平方向和垂直方向上移动步距、移动方向和跟随的移动时间。由此可以推算出射电望远镜在水平方向和垂直方向上的移动速率,经过计算换算成此速率下所对应的控制脉冲数,由此控制两个方向的电机转动,从而实现对太阳的自动跟踪。
2 系统总体设计
太阳射电望远镜自动跟踪系统主要由上位机、下位机、接收天线、转台等部分组成。其中,转台由方位控制电机和俯仰控制电机两部分组成,可以进行两方向自由度转动。系统原理图如图1所示。
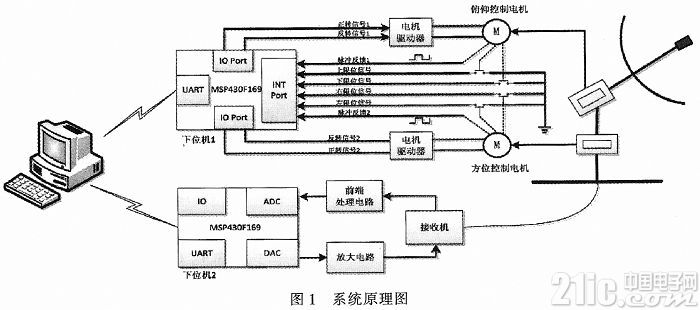
图1中,上位机主要负责控制下位机的工作状态,并对下位机上传的数据进行处理、显示以及存储。下位机主要是MSP430F169,主要负责控制天线的运动以及对数据的采集。
3 下位机设计
太阳射电望远镜实现自动观测的关键点是协调天线系统与接收机系统,望远镜的控制系统不仅要控制驱动天线转台,保证望远镜的天线在观测过程中始终对准太阳,而且控制系统还应在望远镜的天线对准太阳后立即采样收集望远镜接收机的输出信号,并送往上位机供上位机软件进行处理,由上位机计算出太阳的实时天线温度,从而达到自动观测的目的。
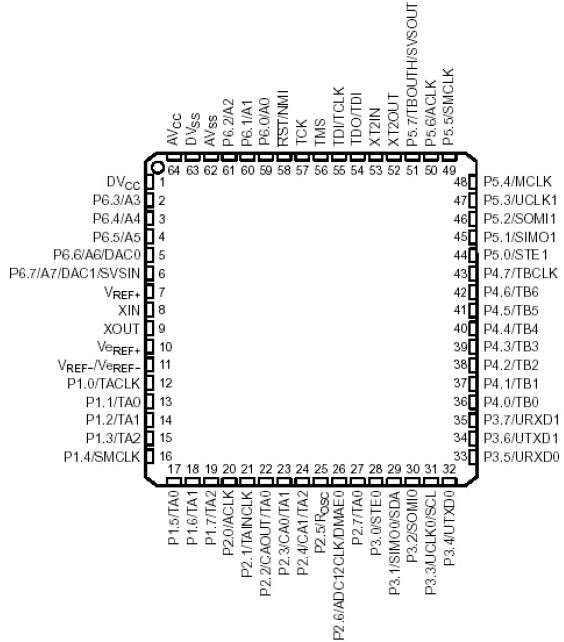
本设计中采用美国德州仪器公司(TI)推出的MSP430F169微处理器,430F169集成了16位RISC结构CPU,外设和灵活的时钟系统,与其他单片机相比MSP430F169大大缩小了产品的体积与成本,并且采用多种低功耗节能工作模式。采用两片单片机协同工作的方式来实现其功能。由此,望远镜控制和采集信号的任务就可以由每一片单片机单独完成。本论文中负责其控制转台转动的单片机我们称之为主单片机,而负责信号采集的单片机我们称之为从单片机。主单片机和从单片机分别有RS485通信线连接到上位机。主单片机接收上位机通过RS485发送的各种控制命令,同时也将天线当前的位置发送回上位机。而从单片机根据主单片机的指示,适时的通过RS485通信线向上位机发送所采集到的数据信号。
3.1 主单片机设计
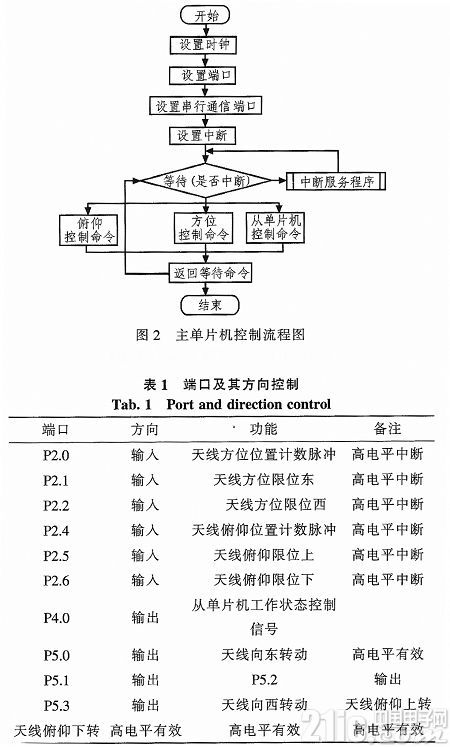
主单片机的控制流程图如图2所示。
主单片机主要负责有关太阳射电望远镜控制的任务:
1)驱动转台;
2)俯仰及方位计数;
3)转台限位。
首先要对时钟进行设置,这里我们将时钟设置为高频时钟源XT2CLK,也就是外接的8 MHz晶振。再次,设置I/O端口。此论文中使用的端口及其方向控制如表1所示。
本论文中串行通信端口的设置为:串口波特率为115 200 bps,1位起始位,8位数据位,无校验位。还使用了3个中断,分别是P2端口中断、串行通信中断和16位定时器A中断。单片机所有的初始化完成以后,程序就进入循坏等待状态。只有上位机发送控制命令时,程序才会进入相应的俯仰控制程序、方位控制程序或从单片机控制程序。
3.2 从单片机的设计
从单片机在观测太阳的过程中需要不停的采集接收机输出电压信号,并将这些信号发送至上位机,其次还要采集天线温度值。温度采集模块使用了一片温度传感器DS18B20从单片机与主单片机一样,都要进行时钟、端口等等的设置。其流程图如图3所示。

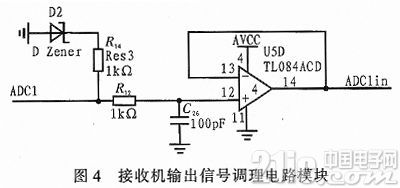
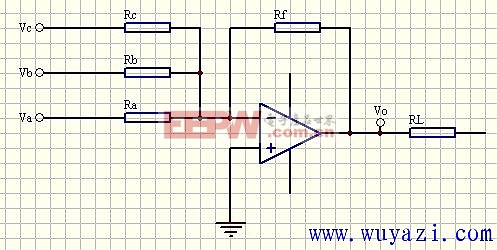
接收机输出信号采集模块完成对接收机输出信号的采样,采样率为100 Hz。接收机输出信号的电压范围是0~5 V,然而由于数字衰减器的延时,太阳有显著活动时,接收机的输出信号可能大于5 V。另外,为避免接收机输出信号在传输过程中引入干扰,需要在运算放大器的前端加RC低通滤波器滤除干扰。接收机输出信号调理模块电路如图4所示,图中信号线ADC1即为接收机输出信号。其采集到的数值会在上位机界面显示。
4 上位机界面设计与显示
Visual C++6.0,简称VC或者VC6.0,是微软推出的一款C++编译器,将“高级语言”翻译为“机器语言(低级语言)”的程序。Visual C++6.0是一个功能强大的可视化软件开发工具。使用其开发的Windows平台应用程序有着无可比拟的优势。太阳射电望远镜上位机的控制界面即采用Visual C++6.0,并利用MFC的单文档视图框架构建了整个上位机的界面。在软件界面的显示方面不仅有自动跟踪,而且还有手动观测、天线校零、天线收藏等。因此选择使用基于CFormView的单文档框架。
太阳射电望远镜自动控制平台的软件界面如图5所示。
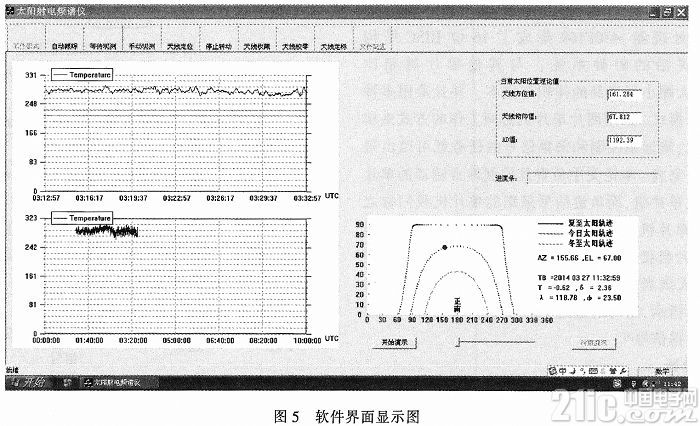
此界面共有5个模块分别是天线控制按钮、当前天线温度动态显示窗口、全天天线温度观测动态显示窗口、当前太阳位置理论值、太阳运动轨迹模拟窗口。
如图6(a)是天线控制按钮图,通过按动按钮上位机就会把命令发送给下位机,下位机接收到相应的命令后会控制天线相应的转动。天线控制按钮有自动跟踪、天线校零、天线收藏等等。
如图6(b)是当前天线温度动态显示窗口,该窗口纵坐标显示天线温度的变化,采用绝对温标,单位为开尔文(K);横坐标轴为时间,其时间采用协调世界时,时间宽度为200秒。横坐标轴采用滚动方式显示,每当下位机有接收机输出信号发送至上位机,上位机即据此计算出天线温度值,并显示于窗口之中。
如图6(c)是全天天线温度观测动态显示窗口,该窗口显示全天的天线温度记录曲线。纵坐标也是显示天线温度的变化,横坐标轴仍是时间,但时间宽度为1个小时40分钟,其
记录世界协调时的00:00—10:00,也就是我们现在的08:00-18:00即白天的时间范围。
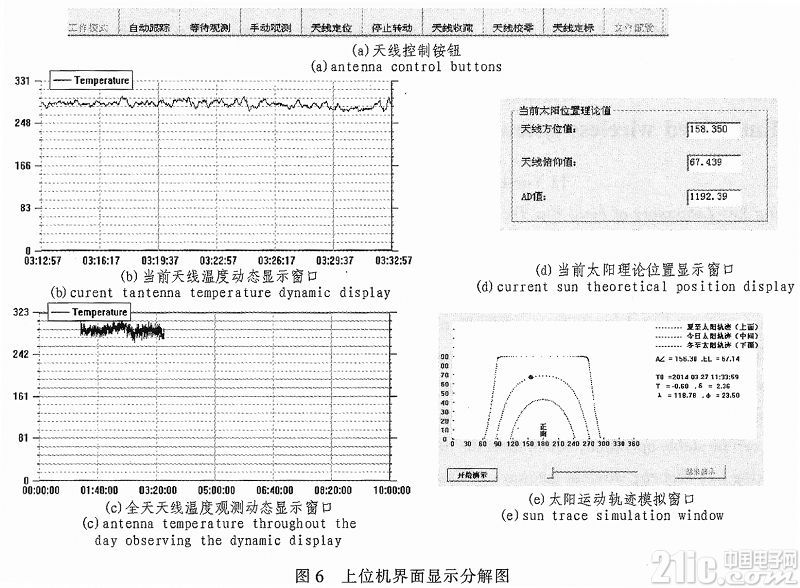
如图6(d)是该部分显示太阳的理论位置,在太阳射电望远镜自动跟踪观测的过程中,用户必须了解到太阳射电望远镜的天线是否正确地对准天体。太阳理论位置给用户使用射电望远镜自动跟踪太阳时提供了一个参考标准。我们选择地理经度为118.78°,地理纬度为23.50°的观测点(采用地平坐标系),时间是在2014年3月27日11时33分59秒。图中AD值即为接收机采集信号采集的值,其单位为毫伏。
如图6(e)是太阳运动轨迹模拟窗口,此窗口有两种显示方式。一是自动跟踪观测太阳时,它实时显示当前天线所对准的太阳位置。二是没有进行观测太阳时,它可以演示太阳的运动轨迹。单击”开始演示”后,中间曲线图的圆点代表着太阳,当前的这一天这个圆点沿着此虚线移动,这就是太阳的运动轨迹图。上面的虚线代表夏至目的太阳运动轨迹,下面的虚线代表冬至目的太阳运动轨迹。
5 结论
本文在实验室射电望远镜频谱仪的基础上,提出了一种太阳射电望远镜观测平台控制界面,完成了一系列的上位机控制下位机,下位机控制主从单片机,单片机控制方位和俯仰电机的转动,从而实现了自动跟踪观测太阳的目的,提出了一个既方便又利于理解的控制界面,真正实现了观测者足不出户的坐在计算机面前就可以完成使用太阳射电望远镜观测天体的任务。

评论