基于现场总线的工业机器人监控系统的研究
3.2系统监控与管理
经过智能模块的计算和转换,各种现场生产数据通过Lonworks网络送到监控中心的计算机,通过FIX或其它组态软件,以DDE动态数据交换 (Dynamic Data Exchange)或ODBC开放式数据库互联 (Open Database Connectivity)接收网上数据,生成数据文件并实时显示,实现对全厂生产现场各机器人的在线监控,并对异常信号还可以进行多媒体的声光报警。 FIX组态软件编写的程序还可以对各智能模块的拆卸、断电和故障做出判断并报警。
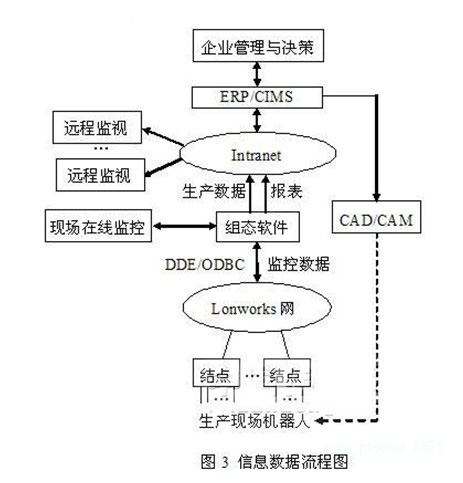
为满足企业信息化管理的需要,可在插有Lonworks网卡的控制网监控主机的内部另外再插一块TCP/IP的企业内部Intranet网卡,利用 FIX或其它组态软件实现企业管理中的生产数据共享。各相关的被授权部门则可通过企业内部网,根据各自的访问权限对生产过程进行远程监视。此外,组态软件还具备有自动生成报表的功能,可生成全厂和各车间的各类报表,各类信息数据都能直接提供给企业的管理人员,并在此基础上构建CIMS或ERP等形式的企业信息化管理系统,用以支持全厂和各车间管理与决策,其数据流向方式如图3所示。
此外,制造业生产的管理具有双重性,根据产品加工过程流程进行的纵向管理,或者根据生产工艺类型和人员配备进行的横向管理。以机器人加工技术为代表的现代化生产线系统具有高度的连续性,从最初的元件或毛坯,经过多个生产环节的逐步的加工和装配,最后形成产品,整个过程前后连贯,其管理模式是纵向的。而另一方面,在同一工厂的不同车间中,各条生产线上都具有处于相同生产环节的机器人设备和操作维护人员,例如每条生产线上都有进料、装配和包装等环节,如果是生产同一种产品,则各生产线中各环节都是平行且相同的。为了以最高效率发挥人力资源,以便于设备的维护和生产的进行,同类生产和技术人员应能够分工管理分布于不同车间中的同一类生产工艺和设备,同时也可以减少生产线维修的备件数量。这样就可以最大限度的减少备用劳动力人员,由每车间一组备用人员精简到全厂多个车间共用较少组的备用人员,也就是横向化管理模式。
但这种纵横交叉的模式,在一定程度上增加了管理上的难度。应用现场总线这种网络化控制技术,可以很好地解决这一问题。通过FIX组态软件所制作的监控界面,既能按各车间生产线的实际加工过程进行监控,也能够将分布于厂区不同车间内的同类机器人加工过程放置在计算机的同一监控窗口之内,形成一个一体的 “虚拟车间”,使处于不同车间的同类机器人的现场数据可同时显示于这个“车间”的内部,这样就可以灵活的配备生产、技术和维修过程中所需要的人员,并进行高效的生产物流控制,从而提高整体的管理效率。









评论