基于52单片机的智能小车的设计与制作

引言:
本文引用地址:https://www.eepw.com.cn/article/201609/297206.htm随着电子技术、计算机技术和制造技术的飞速发展,消费产品呈现光、机、电一体化、智能化、小型化的趋势。各种智能化小车在市场玩具中占一个很大的比例。传统玩具的市场比重正在逐步缩水,高科技含量的电子玩具蒸蒸日上,日益成为电子玩具行业的发展主流。智能控制与传统控制有机的结合起来,取长补短,提高整体优势,更好地满足人们的需求。智能技术必将迎来它的发展新时代,因此,我们设计了这款智能小车。
1、机械部分总方案
在小车的机械要求保证预定的功能的前提下,我们还考虑到小车的经济、可靠、外形美观,性能好、富有时代特点。
转向机构与驱动系统的设计是至关重要的。为了保证小车转向时精确、灵敏、可靠性高且在转向时小车前轮纯滚动而无滑动,利用阿克曼原理及解析算法,设计出等腰梯形的双摇杆机构,小车的完美转向变为现实。
1.1、机械控制原理
在以单片机为核心的控制下,直流减速双电机驱动小车后轮,舵机通过等腰梯形双摇杆机构控制小车转向。
如图一所示:
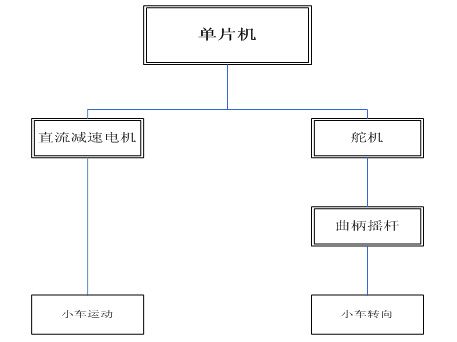
图一:机械控制原理图
1.2、阿克曼原理:
如图二所示:
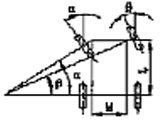
图二:阿克曼原理示意图
转弯时因轮距与轴距的关系,两前轮转角不同,内侧轮转向角比外侧转向角大,要使车辆转向顺利,车轮在地面纯滚动而不产生滑移,必须使所有车轮都绕同一瞬时转动中心滚动,两前轮转轴延长线与后轮轮轴延长线交与一点,这是阿克曼原理。此时,转向的内外轮转角关系为 :
ctgβ-ctgα=M/L
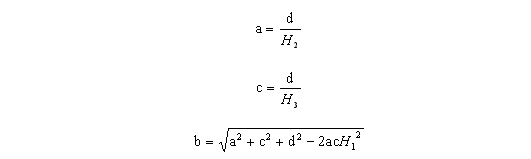
由解析法计算等腰梯形双摇杆机构连杆、连架杆长度:
已知连架杆AB的三个位置与连架杆CD的三个位置相对应,即三组对应位置为
建立直角坐标系,如图所示,和分别为AB和CD的初始角,各杆长度分别用矢量和表示。将各矢量分别在轴和轴投影,得到投影方程
在上述方程中消去并整理,可得与之间的函数关系
在上式中令:

通过化简可得到:
将两连架杆对应的参数分别代入到方程得到,再根据其他条件选定机架长度,据此,可求出其余杆的长度
有了小车的驱动结构和转向结构,将小车其他零件装配好,可得到小车的装配图,如图三:
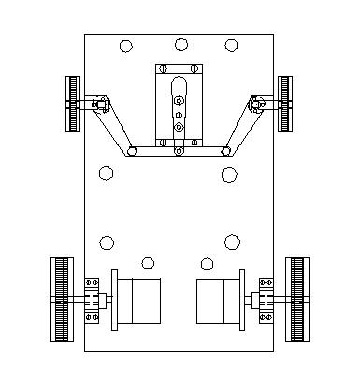
图三:小车整体装配图
2、电路部分总体方案
智能小车采用52单片机作为控制器,通过控制电路控制舵机转向和直流减速电机的转速、转动方向,使小车能够走直线和转弯。运用集成的红外对管GP2A25来巡线,安装在车子前方,并排安装三个,采集路面信号反馈给单片机,再由单片机控制电机的转动和方向的调整,从而达到巡线的效果。整个小车还采用金属传感器来识别小车巡线上的金属。
整个小车的结构图如图四所示:
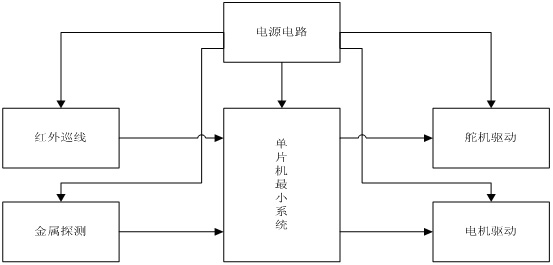
图四:电路部分总方案图
下面分别讨论以上五个模块。
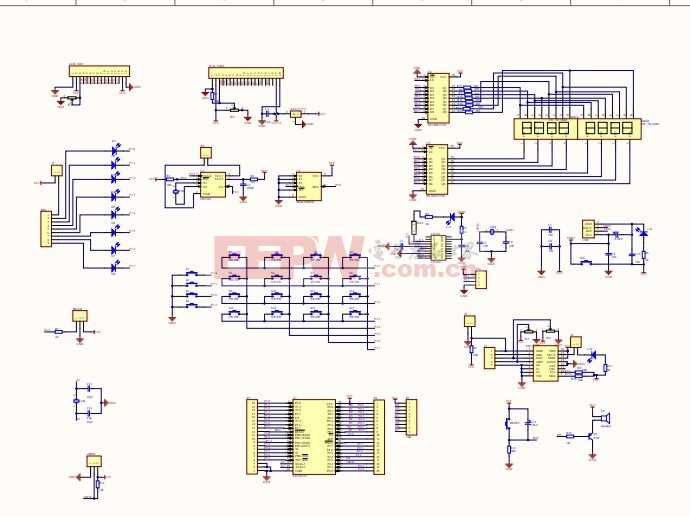
2.1、单片机最小系统
单片机要能够工作,必须加上晶振和复位电路,如果用到P0口的话还得给其加上上拉电阻,保证通电后P0为高电平。另外还得有给单片机烧写程序的下载器,这个老师已给。单片机是此电路的核心部分。设计采用的52单片机,其工作电压为5V(20引脚接5V,40引脚接地)。单片机根据程序输出逻辑电压从而完成控制作用。本设计使用单片机的P0.5到P0.7引脚来作为红外巡线的反馈控制引脚。P0.4为金属传感器的控制端口,只可惜时间上不允许我们把金属探测的功能做出来。P2.0到P2.3,为直流减速电机的控制线接口,能控制左右电机的正转、反转和停转;P2.4和P2.5为电机的使能端接口,分别控制左右电机的转速。P2.6为舵机的控制线接口,通过控制占空比来控制舵机的转向及转角大小。电路图如图五:
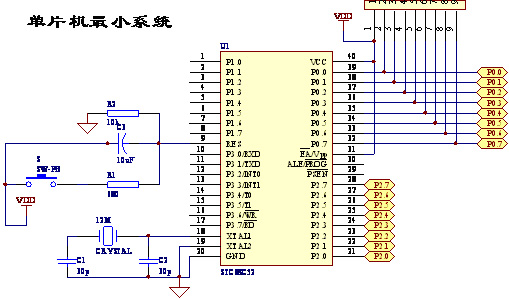
图五:单片机最小系统
2.2、电源模块
首先单片机用到的是5V的数字电,而电机驱动要用到L298的芯片,这种芯片用到12V的模拟电压,驱动舵机用到的又是5V的模拟电压。这就用到了三种电压。我手上有一块12V的电池,能够供给L298作为电机驱动的电源。然后我选择L7805来得到5V的模拟电压。最后供给单片机的也是此电压,然后把数字地和模拟地共地,从而得到了整个智能小车的总体供电系统。但是由于数字电和模拟电共在一起,干扰很大,系统的效果并不是很好。电路图如图六:
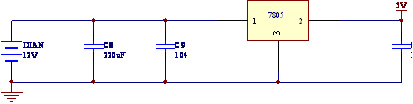
图六:电源模块电路图


评论