第二代FlightSense的ToF激光测距的工程设计考量
摘要:ToF激光测距的精准度更高,可用于手机、控制面板和家庭服务机器人等。近日,ST公司推出了第二代FlightSense,并介绍了其原理及工程设计理念。
本文引用地址:http://www.eepw.com.cn/article/201608/296180.htm各种测距技术一览
测距方案很多,有传统的红外(IR)测距,精准的激光测距,还有近距离的电感式,测较远距离的超声波测距,甚至气压计也是一种测距方案,可以知道你离地是10公里还是5公里。
红外测距类似ToF原理,但它通常是两个元器件,发射和接收分开,也有的做在一起,但做在一起也要在系统上开两个洞。而FlightSense是封装在一起的一个芯片。
手机上传统的红外光传感器的红外光源对精度要求不高,而且没有计算时间差的能力,主要计算反射回来的光强度。其应用非常多,最常见的是打电话时,靠近耳朵时屏幕会自动关闭,不然手机靠在耳朵上时,不小心碰到了滴滴叫车,打一通电话也叫了三辆车。
测量光强度往往判断不精准,因为不同颜色物体对光的反射率/吸收率不同。

还有电感式的产品,但因为电感式的距离比较近。红外的距离通常也不远,做到10厘米内勉强可行,10厘米外不是它有没有精准度,就是扫描不到了。
再就是很长距离的应用,比如汽车导航用的超声波。其测距较长,20、50、80米等,但块头也较大,一般不容易装进消费类电子中。它的优点是能够测得很远,缺点是近距离时精准度有问题。假设你有50米的能力,你的误差1米问题不大,你倒车的时候,昨天和前天的警示音差了10厘米,你并不在乎,因为倒车时可能在1米或80厘米就开始警示你了,今天是75厘米警示你,后天是81厘米警示你,无所谓,所以应用的场景和精准度需求也不一样。
ToF(Time of Flight,飞行时间)测距也有两种,分别是基于相位的方法[1]和FlightSense直接计算光子返回时间差的方法。相位测距所谓的脉冲式,像一个锯齿状,相位式就是测波,怎样有正波和负波,但是它的激光必须累积到一定能量,一叠两叠三叠它叠了很多,但是必须回到一个关键的问题——安规。相位波的波峰超过特定的强度可能会不符合安规,因为你的波峰如果符合安规,其他的波就太弱了,所以相位法在消费性电子上的应用是受限的,因为如果波峰才能用,非波峰的地方全部浪费了,等于一秒的读值能利用的较少。这时一秒30发不够用,要拉到50发。而ST公司的FlightSense没有这个问题,FlightSense最关键的技术是如何在更远的地方拿到更多的光子。
因此,相位测距可能在工业应用上比较多,因为工业应用没有波峰的瓶颈。

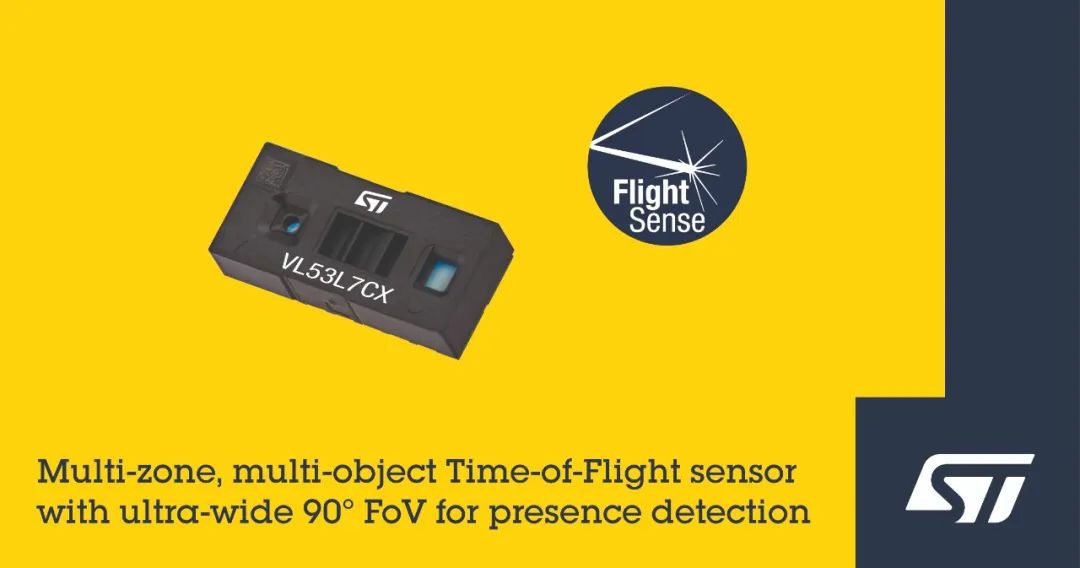
ST第二代FlightSense问世
ST(意法半导体)在2015年曾发布过FlightSense,用于VL6180X激光测距传感器上,在手机和智能面板测距市场取得成功。“FlightSense是全球市场排名第一的ToF解决方案。”ST影像产品部技术市场经理张程怡称。今年6月30日,ST又推出第二代FlightSense 技术,并用于新的VL53L0X激光测距传感器上。
VL53L0X将ToF测距长度扩至两米,精确度在±3%范围内。测量速度较上一代产品更快,测距时间不足30ms;更高能效,正常工作模式下功耗仅20mW,待机功耗只有5µA。封装尺寸为2.4mm x 4.4mm x 1mm,在市面上同类产品中很小。
近日,ST公司张程怡经理又详细介绍了FlightSense的测距原理及第二代产品推出的工程设计考量。
FlightSense激光测距原理
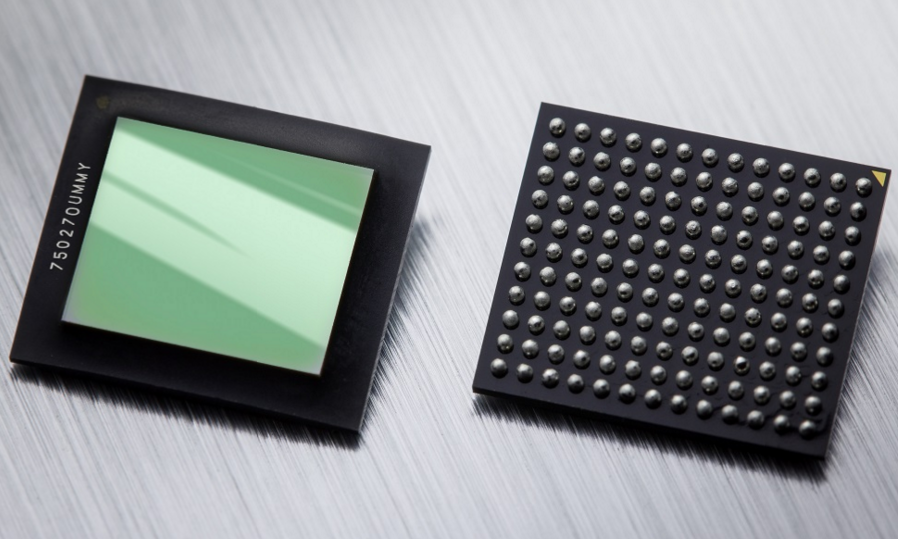
图1是FlightSense器件基本构造。左边是FlightSense器件,该器件非常小,手都捏不起来。一个口是发射,另一个是接收。实际上,所有测距或者感应的产品基本是这个原理。其特点是应用领域广,因为到处都有光反射。
该产品之所以叫做测距,因为它利用了光子旅行的时间,乘上光速除以2得到距离。它利用的是光射到物体以后会反射回来。因为算的是时间差,所以它能够克服大部分环境光的干扰。如果是黑色、白色物体,即便回来的光的数量(光强)是不同的,但它的返回时间是一样的。有这样一个比喻,假设现在回到旧社会,现在派出100个兵去侦查,结果90个给击毙了,只回来10个,和我派出100个兵去侦查,10个被击毙,回来90个。如果我用这来作为依据的话,他们去到的地方是一样的,只是回来的人数不同。如果我是用回来的数量(强度)计算的话,回来90个人表示地方很近,回来10个表示地方很远,这就会产生误差。所以,FlightSense测距之所以能够突破性地发展,就是因为可以用光的时间差来测距。
图2的左图是ST的第一代产品。第一代产品有一部分手机的应用,有一部分作为智能面板的开关的应用。中间是2016年6月30日发布的第二代器件,优势是最远能够做到2米的测距。预计一年后的2016年推出第三代测距,测距能力在现有能力上再翻一番——达到4米。
FlightSense可应用于手机、平板上,还可以用于卫浴、机器人、面板等。图2中,注明第一代FlightSense带有环境光感测的功能,第二代没有了。其原因是环境光感测是能够知道环境的明暗,它一般对有显示屏的面板才有意义,因为显示屏距离40厘米以内,比如手机显示屏、家居面板显示屏等,人靠近它,它会亮起来。第二代产品的应用场景相对远,就没有定义这类应用。
FlightSense第二代产品——VL53L0X有几个特点。如图1有发射和接收部分,发射是一个激光源,接收就是所谓的SPAD红外接收器。另外感应器,传统上的摄像头有800万像素、1300万像素,更牛的还有2000万像素,但强项基本是可见光,也就是它需要做成像,你拍张照可以看到红橙黄绿蓝靛紫,但在FlightSense,不在乎光的颜色,而在乎光子的数量,其制程也是非常独到。因为SPAD是半导体的制程,也是ST自己拥有和生产的。

第二点就是发射端,VCSEL。VCSEL两代用的光是不同的,第一代用的是850纳米光,第二代是940纳米光。
第三点是符合一级安规。一级安规表示适合消费性电子,人眼能够直视,不伤眼。
第四点是全功能的集成。
图3列出了第一代和第二代的比较。可见第二代最小测距达到了2米,这个2米直觉上还是要有一个特殊的场景的设置,就是背景光比较暗,目标又比较白,经过一些特殊的软件配置做到的。在一般的应用环境,1.5米是可以做到的。如果1.2米左右的表现,基本拿出来就能达到了,所以距离和使用者的应用场景有关。
另外,二代的激光器频谱不同。图3右图代表太阳光的频谱。人眼只能看到一部分频谱,即可见光。在人眼看不到的光中,其中第一代用的是850纳米,在光中为什么要找到850纳米呢?因为人眼看不到,因此干扰较少。为什么第二代要到940纳米呢?如图3,940纳米是自然界中,尤其是室内环境含量最低的一个波谷。因此,由于激光器所发射的940纳米的波段在环境中数量很少,因而发出的光受到的干扰很小,因此,第二代比第一代的有效距离长了很多。这是FlightSense所独有的技术。另外,算法上的优化也是测距更长的一个原因。
那么,第二代的测距时间也减短了,也和940纳米有关系吗?答案是肯定的。测距快,最主要的原因是激光源的改善。因为940纳米收回来的信息相对纯净一点,因此,处理速度就加快了。另一个原因是算法的优化。
图4是FlightSense的探测锥形图。系统视野FoV(Field of View)是25°。FlightSense发出光的角度是圆柱角,特别像麦当劳的圆筒冰激淋。
刚才提到了冰激淋筒的圆锥角,一般是FOV 25°,从一个立体的角度看,就是上下左右各单边12.5°。第一代测距是40厘米,所以有一个直径约17厘米的有效的工作区块。第二代测距达到2米,这个区块直径达到90厘米,是很大的。
问题是:FoV 25°是怎么来的?实际上,市场上常见的是25度、35度的规格,每家供应商的侧重做法应该各有优劣。这好像轮胎的规格,你也不能说不能创造不同的规格,但车子就只有几种不同的规格。
ST是为了在精度更有效的涵盖范围内做取舍。因为角度越大会越散,会担心精度有折扣。但是角度太小了,涵盖的范围又太小。另一个考量是基于照相的需求,1.2米经常是手机摄像能力的正常点,因为照相的屏幕是方形,测距的圆怎样达到满圆?大概在25°角左右。所以有这么一个潜规则,但这也不是唯一的规范。
ST以后还会继续在这个25°吗?未来可能会有一些变化。在两代产品的经验上,在取舍角度方面会有一些创新。但方向不会变得很大,只是在这个范围内做优化调整。
测距的速度是毫秒级的,每秒可读出约30个读值。其速度远大于人眼接受或者其他主芯片能够跑的速度,所以这个速度可以应付各种日常的应用,诸如吸收槽、面板、测距的应用等,这些场景一般一秒3个或5个读值已经是很强的了,生活上用不了这么大的读值。之所以这么快,因为做了很多手机上的相关应用。

为了方便客户和开发商开发,ST也开发了两套应用的样片演示板。因为FlightSense器件非常小,拿去焊接非常困难。另外的原因是光学器件两个开口是不允许有污染的,容不下灰尘,所以,ST开发出小板,让客户很容易手焊。在方案中还有一个小MCU,封装在器件里。
FlightSense的应用有四个方面。第一,通信和计算机上面的应用,例如手机。第二,家用,诸如机器人、卫浴、面板、娱乐甚至玩具类应用。第三,新应用,玩具、首饰控制、虚拟显示头显中的手势控制等。第四,消费类的电子交通、安全、商务等。
FlightSense设计的热门问题
*因为有许多被测物体会吸收这些光子,ST的接收器件是不是应该加一些元器件来倍增一下?
目前没有这种做法,但往后会有类似的做法,ST第三、四代器件会做,就是怎样对付低反射率的物体。的确,对付颜色是一个关键指标,例如白色反射率高,黑色是吸收色。
第三代FlightSense如何从2米提升到4米,表示今天我对这个特定的物体只拿到100颗光子,我如何把100颗增加为200颗,或者如何在4米之外也能拿到100颗,所以其中一个做法,除了结构之外还有光学的做法,就是会加入光学的元素,加镜片,所以,镜片就能够通过凹凸透镜把更多的光给拉进来。
*所以今后主要是加镜片?
对,主要是通过光学的方法,因为FlightSense内部的结构做得不错,但难点在于怎样让更多的资讯进来。
*ToF传感器模块领域的投入是不是近几年才开始加大的?
ST投入的时间大概是这三五年。在2015年前花了很长时间在定方案和规格。
发展技术的基础有两个:一是ST过去是做光学影像的传感器,所以才能够做光学的处置的工作。二是过去在欧洲的太空科学当中,就有一个抓人造卫星的技术,除了数学运算以外,如何知道卫星的位置在哪儿,是不是跟数学计算是一致的,就要用物理的判断方法,这是一个重要的方式。激光架在山顶上,趴着三更半夜在打激光就是为了确定距离。
*这个产品属于数模混合芯片?
这是一个光学芯片,就像做相机摄像头2000万像素或800万像素的传感器的制程。因此,基本上就是一个光学传感器,只是它制作的元素和诉求不在于照相,它的像素也不是2000万。因为它的原理根本不需要这个,它要的是能够对光子的感应,但从纯制程角度来说几乎是一样的。
*除了手机领域之外,您认为未来在哪些领域它的增速会比较快?
比较侧重教育类的产品。觉得马桶的应用估计国内是一个风潮。服务型的机器人也不错,因为怕机器人撞人、撞到玻璃、撞到桌角等,所以要求它的可靠度越来越高。
*笔记本电脑有摄像头,它可以用摄像去做,只需要判断有或者没有,它完全从软件上做就可以了,没有必要去集成FlightSense?
摄像头也是一种做法,但ST寻求不同的切入点,例如在功耗上,摄像头的耗电稍大一些。因为低功耗是硬件的优势,软件的优势就是我会自己跑,但缺点是中断才告诉你,所以系统会休眠掉,所以人离开的这三个小时里,摄像头到底要隔多久拍一次照,这也不好控制。硬要做是可以做的,机会也还是不错的。
*FlightSense的核心竞争力是什么?
ST在安规、精准度、尺寸和功耗上有显著的优势。
参考文文献:
[1]王莹.基于相位的ToF测距方法避免了背景光影响.电子产品世界,2016(4):78
[2]刘超,田俊杰.基于SOPC的高精度超声波雷达测距系统设计.电子产品世界,2015(11):51-53
[3]卓晴,鲁畅,金浩哲.高速微型光电检测电路设计.电子产品世界,2016(6):48-49
[4]贾南.顺序式波长色散X射线荧光光谱仪的运动系统控制.电子产品世界,2016(5):59-61
[5]Black B.用于宽范围光电二极管的跨阻抗放大器具有苛刻的要求.电子产品世界,2015(4):68-69
本文来源于中国科技期刊《电子产品世界》2016年第8期第21页,欢迎您写论文时引用,并注明出处。





评论