基于dsPIC30F5011的ABS电子控制器设计
0 引言
汽车防抱死制动系统又称 ABS,是一种具有防滑、防锁死等优点的安全刹车控制系统。没有安装ABS 系统的车,在遇到紧急情况时,来不及分步缓刹,只能一脚踩死,这时车轮容易抱死,加之车辆冲刺惯性,可能发生侧滑、跑偏、方向不受控制等危险状况;而装有ABS的车,当车轮即将到达下一个锁死点时,刹车在一秒内可作用60 至120 次,相当于不停地刹车、放松,即相似于机械的“点刹”。因此,可以避免在紧急刹车时方向失控及车轮侧滑,使车轮在刹车时不被锁死,轮胎不在一个点上与地面摩擦,加大了摩擦力,使刹车效率达到90%以上[1]。
ABS 系统的关键控制部件是ABS 电子控制器,即ECU。本文在分析了ABS 制动原理和控制器结构基础上,针对某车型选用具有强大数据处理功能的dsPIC30F5011 单片机,结合ABS系统芯片,完成了ABS_ECU 硬件设计,并开发了控制程序,在自主研发的硬件在回路仿真器上进行了仿真实验,得到了良好的效果。
1 ABS制动原理
在汽车的制动过程中,使汽车制动而减速行驶的外力是路面作用于轮胎胎面上的地面制动力,但地面制动力取决于两个摩擦副的摩擦力:一是制动装置对车轮的摩擦力,即制动器制动力;另一个是轮胎与路面间的摩擦力,即地面附着力。只有当汽车有足够的制动器制动力及地面附着力时,才能获得足够的地面制动力[2]。汽车制动过程中通常存在滑移现象,即车速和轮速之间存在着速度差所造成的相对滑动,这种滑移的程度由滑移率来表示:
汽车制动时,附着系数与轮胎滑移率关系曲线如图1 所示,图中φ表示附着系数。
由图1 可知,滑移率在15%-20%时,横向和纵向的附着系数都比较大,而大量的研究试验也表明,此时汽车的制动效果最好。
ABS 在汽车制动过程中,当车轮趋于抱死,迅速降低制动系统的压力,使车轮滑移率恢复到靠近理想稳定区,通过自动、高频率的对制动系统压力进行调节,使车轮滑移率保持在理想滑移率附近的狭小范围内,以充分利用车轮与路面间的纵向峰值附着系数和较高的横向附着系数,从而实现防止车轮抱死并获得最佳制动效能[3]。
2 ECU硬件设计
2.1 ECU结构组成
ABS 系统主要由车轮转速传感器、电子控制器(ECU)、电磁阀三部分组成。而系统核心部分是ECU,其组成如图2 所示,主要包括系统电源管理、轮速信号处理、处理器(单片机)、电磁阀驱动器和ABS 故障检测等部分。
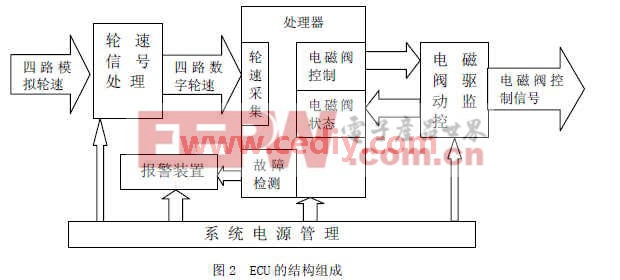
轮速信号处理模块将输入的模拟轮速信号进行变换处理,得到规则的数字轮速输入到处理器中,由处理器计算并判断各轮是否正趋于抱死;电磁阀驱动监控模块放大来自处理器的电磁阀控制信号,使其能够驱动执行机构(制动压力调节器)调节制动压力使轮速处于不断循环的增压-保压-减压状态,同时将当前电磁阀控制信号反馈至处理器来监控控制逻辑。
2.2 处理器选型和设计
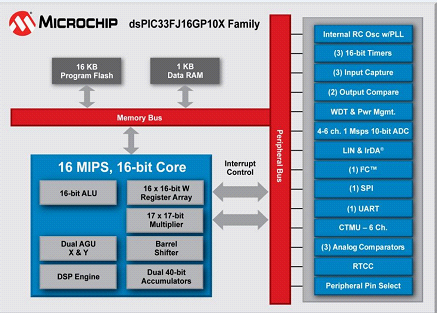
ECU 最关键的部分是处理器,目前大多采用16 位单片机作为ECU 的处理器,其一方面采集轮速信号进入ABS 算法处理,另一方面发送电磁阀控制指令到执行机构,对车轮进行增压-保压-减压处理;同时它还外扩了故障检测、电磁阀监控部分,保证了ECU 正常运行。无论是轮速采集和算法处理,还是对车轮制动压力的控制,都对核心处理器有较高要求:实时性强、稳定性好、数据处理精度高等。Microchip 公司的dsPIC30F5011 作为高性能1
位数字信号控制器,既具备了单片机的控制功能,也结合了DSP 的数字信号的处理能力。该芯片内含完整的DSP 引擎:包含1 个高速的16×16 的整数乘法器、1 个40 位的ALU、2 个40 位的饱和累加器以及1 个40 位的双向移位器,能够明显提高芯片计算能力。指令系统分成两类:单片机类和DSP 类。采用单级指令预取机制使得其指令大多数是单周期的。片上集成66K FLASH,1K EEPROM,4K RAM,8 通道的输入捕捉,一个8 通道的脉冲宽度调制模块(PWM)。结合ICD2(在片调试器)在MAPLAB IDE 开发环境中,对单片机进行程序编辑、编译、在线
调试和下载。
处理器的功能接口分布如图3 所示。采用dsPIC30F5011 的输入捕捉口(IC1…4)采集4 组轮速信号,根据设置的采集方式可以准确地侦测轮速信号的状态,经过ABS 算法后,通过8 路I/O 口输出电磁阀控制信号,同时将电磁阀状态由8 路I/O 口反馈到处理器,形成一个闭合回路用来监控算法的控制逻辑。同时,采用一个PWM 口输出报警灯信号,通过设置报警灯的闪烁频率来判断故障类别。来自刹车板的制动信号经光耦隔离进入到单片机中。有效的制动信号是进入ABS 算法的一个入口条件。
2.3 轮速的采集和处理
电磁波动式轮速传感器将轮速转换成正比于轮速的正弦信号,一般轮速信号的频率低于1KHz,并且幅值比较低,而且干扰量较多,必须将其转换为TTL 电平的方波信号,所以需要信号变换电路将变换后的轮速信号输入到处理器中。本设计采用了4 通道的轮速采集,经LM324A 放大轮速信号,再利用低通滤波和算法中的滤波部分削减干扰量;最后经过74HC14整形后的数字轮速信号,即为方波,便可输入到处理器中。
2.4 电磁阀控制信号的输出和处理







评论