基于dsPIC30F5011的ABS电子控制器设计
经过ABS 算法之后,处理器产生了8 路电磁阀控制信号,以两路电磁阀控制信号为一组来控制一个车轮。其组合控制策略为:00 保压;01 增压;10 减压。处理器输出的电磁阀控制信号只有几十毫安,而执行部件需要的电流为1~2A,所以需要对电磁阀控制信号放大。本设计采用Infineon 公司的ABS 系统驱动芯片TLE6216,每片可以驱动四路的电磁阀控制信号,同时把当前的电磁阀状态反馈到处理器中,监控控制效果。
2.5 电源和故障检测
为汽车中供电的是蓄电池或者发电机,重型车的蓄电池为24V,发电机工作电压为28V,单片机工作电压为5V,所以除了电源供给外还需要电压转化。设计中采用了Infineon 公司的ABS 系统电源芯片TLE6210,它可以将12V 的电压转化为单片机需要的5V,同时集成了报警灯、发动机驱动等功能。另外TLE6210 内部集成了电压监控逻辑模块,当检测到输入输出电压过高或者过低时,引脚RES1/RES2 将产生复位脉冲,让整个系统复位。由于系统电源有模拟部分和数字部分,需要在两部分电源之间添加隔离电感,防止系统中模拟电路和数字电路的互相干扰。
对于ABS 产生的故障,主要包括:系统供电故障,轮速传感器故障,ABS 系统运行故障,电磁阀故障等,操作人员可通过故障警报灯的闪烁频率来判定故障来源和类型,并将相应的故障码存储在EEPROM 中,以便上位机进行识别和处理。
3 软件设计
目前的ABS 系统主要采用参考门限值控制的方式,即Bosch 控制逻辑。这是当今被广泛采用的一种逻辑。这种方式将车轮角减速度、角加速度和滑移率组合作为控制参数【4】
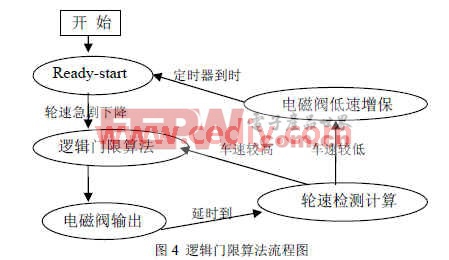
本文就是采用了以车轮的角加速度、角减速度为主要门限,以滑移率为辅助门限的控制策略,具体实现流程图如图4 所示。
 本文引用地址:http://www.eepw.com.cn/article/197885.htm
本文引用地址:http://www.eepw.com.cn/article/197885.htm当检测到有效的刹车信号时,处理器通过轮速传感器采集到轮速脉冲信号,然后计算车速和加速度,当车速较高时,调用滑移率逻辑门限算法,由电磁阀来输出保压、减压、增压信号,即初始制动时增压,在达到加速度门限,并且滑移率仍然保持在稳定区域内时保压,一段时间后达到滑移率稳定临界值减压。如此往复,使车速呈现波浪式降低。若车速较低,电磁阀直接输出增压或者保压信号,此时轮速一直在减小,没有回升,直到减小至零。
4 硬件在回路仿真试验
利用在前期完成的国家“863”计划项目“面向汽车电子控制的嵌入式系统开发平台及其应用” (2004AA1Z2380)中开发的硬件在回路仿真系统(如图5 所示),我们对此ABS 控制器的制动过程进行了仿真,仿真结果如图6、图7 所示。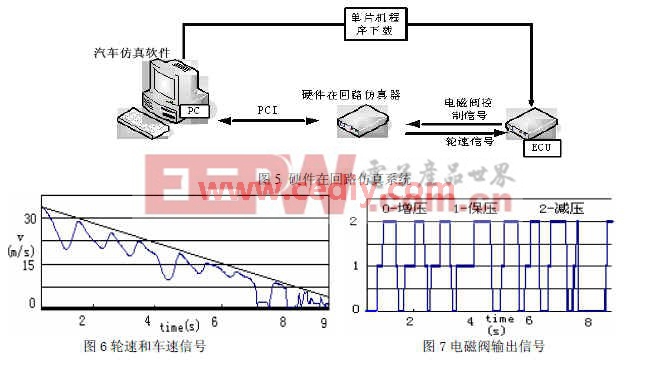
图6、图7 是某气压制动型重型车在低附着系数路面、初始车速为33(m/s)情况下的制动过程。观察轮速曲线对应的电磁阀的状态变化:增压-保压-减压;当轮速回升阶段,电磁阀的状态变化是:减压-保压-增压。由此可见,制动时车辆在ABS ECU 控制下较好地防止了车轮抱死、轮速波动相对稳定,并且制动时间较短,所以此控制器具有良好的制动效果。
5 结论
采用Microchip 公司的dsPIC30F5011 作为ABS 系统的处理器,实现了轮速的快速采集、判别处理,以及滑移率等参数的计算,保证了控制的实时性、稳定性。同时结合Infineon 公司的ABS 系统芯片,使系统的电源管理、电磁阀驱动等更加优化,通过多次仿真试验可以看出此ABS 控制器制动效果良好。
本文作者创新点:选用DCS(数字信号控制器)dsPIC30F5011 作为处理器,解决了数据的快速、大量的传输和运算,采用C 语言编写的ABS 逻辑门限算法运行周期可以保持在5ms内;采用专用ABS 芯片优化了该ABS 控制器的电源管理、电磁阀驱动等,可缩短开发时间,保证系统整体性、稳定性。为ABS 控制器的产品化提供了试验数据和设计参考。







评论