车载机器视觉技术保障您的行路安全

引言
本文引用地址:https://www.eepw.com.cn/article/197383.htm随着我国道路交通事业发展迅猛,汽车保有量已超过1.5亿辆,并且保持继续增长的趋势。道路交通运输的蓬勃发展为我国的运输事业提供了强有力的支撑,但同时也带来了巨大的交通安全隐患。道路交通事故已成为各种事故之首,是建立交通运输安全可持续发展的交通体系的重大阻碍。因此,通过技术手段建立道路交通安全保障系统以减少交通事故是是当务之急。本文在剖析驾驶过程中驾驶员视觉功能的基础上,对基于车载机器视觉的各种汽车安全技术的研究现状进行介绍与分析,并展望该领域的发展趋势。
1 驾驶过程描述
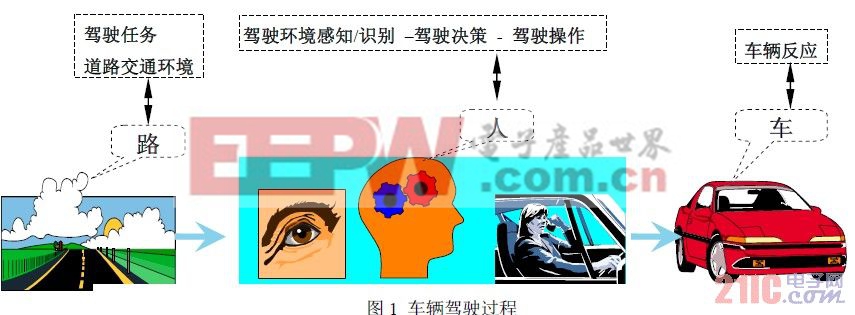
根据人行为的刺激—机体一反应经典模式,驾驶汽车的行为可分为三个阶段,如图1所示,即感知阶段、判断决策阶段和操作阶段。在感知阶段,驾驶员对实时的交通状态信息进行获取和初步理解,通过感觉器官感知汽车的运行环境条件;在判断决策阶段,驾驶员结合驾驶经验和技能,通过中枢神经系统分析判断,确定有利于汽车安全行驶的措施;在操作阶段,驾驶员依据判断决策,通过运动器官作出实际反应和行动。汽车行驶时,驾驶行为是这三个阶段所组成的一个不断往复进行的信息处理过程,也就是感知作用于判断决策从而影响到操作。感知阶段是保证安全驾驶的基础。如果没有感知到准确和及时的环境信息,极有可能导致判断决策和动作的失误,酿成交通事故。在感知阶段获取信息主要靠视觉、触觉、嗅觉和听觉,其中80%以上是通过驾驶员视觉获取信息的。驾驶视觉直接影响感知信息量的广度、深度和准确性,因此,驾驶员的视觉特性与行车安全有直接的联系。基于车载机器视觉的汽车安全辅助驾驶技术旨在提高驾驶员视觉效能,通过改善视觉和驾驶行为的关系,并辅助驾驶以减少因视觉原因带来不当操作,从而使人-车-路系统更加稳定可靠,提高车辆的主动安全性。
2 车辆外部信息的机器视觉辅助驾驶技术
人眼的作用能力是有限的,获得通过一系列车辆外部信息的机器视觉辅助驾驶技术可以提高视觉适应性、增加视觉范围、增强视觉理解深度。从车辆操作过程来划分,车辆外部信息的机器视觉辅助驾驶技术的研究包括:驾驶环境的视觉增强与扩展和驾驶环境的机器视觉识别。
2.1 驾驶环境的视觉增强与扩展及显示
2.1.1 视觉增强
视觉增强系统是智能交通系统中先进车辆控制技术之一,能够提供在不同气候(雾天,雨天,沙尘)、一天中不同的时间的增强驾驶员视觉。一般有两种增强方法:①通过传感器感知系统来监控道路交通环境,处理信息而得到实时道路交通状况,并将相关的视觉信息提供给驾驶员,从而达到智能视觉增强的目的;②通过改善驾驶员的视觉环境,提高驾驶员视觉效果。主要是除去挡风玻璃上的雨水和霜、提高汽车前照灯的智能化等,达到增强低能见度、低照度等不利条件下的驾驶员视觉目的。
利用人眼的视觉特性,采用CCD、红外传感器、车速传感器、GPS及毫米波雷达等传感器获取道路信息,进行信息处理和融合,提取低能见度、低照度下交通环境的有用信息并剔除噪声,并以图像的形式提供给驾驶员。低能见度视觉增强系统最早应用在飞机着陆中,二十世纪80年代末期至90年代初期,人们提出了视景系统(VisionSystem)概念。采用不同手段和不同综合方法构成的视景系统分为:
(1)传感器视景系统(SensorVS)
前视传感器实时检测到的驾驶舱外视见景象,可以由单传感器生成或多传感器综合,其视景接近真实世界的自然景象。
(2)合成视景系统(SVS)
由地形数据库存储的地形模型构建的虚拟视景称为合成视景(SV)。
(3)增强视景系统(EVS)
传感器视景和合成视景的叠合称为增强视景(Enhancedvision)。既有实时探测到的自然视景,也有数据库生成的虚拟视景,两者匹配叠合,即利用虚拟视景的深刻轮廓线去增强模糊视景,包括了SensorVS和SVS两个系统,它们在恶劣的气象条件下可以增强窗外视景的可见性[1]。







评论