基于超声探测的停车场车位引导系统的研究

1、引言
本文引用地址:https://www.eepw.com.cn/article/196681.htm随着停车需求的增长,停车场的规模也越来越趋于大型化。国内对智能停车场也进行了大量的研究,但目前我国的停车场管理系统大多还存在智能化、集成度低的缺点,忽视了停车过程的自动化,特别是车位的引导。如何检测车位和引导司机方便的泊车也是停车管理的重要组成部分,该方案通过对最短路径有效算法和场内车位引导。及现场总线通讯等方面进行阐述,对特大型智能自动化停车场的设计具有一定的参考价值。
2、超声探测和引导系统的原理和组成
2.1 超声探测简述
超声波探头完成超声波信号的发射与接收,单片机系统及相关电路完成信息的分析与统计。在停车处上方安装超声波检测器,由上往下发射超声波,对从地面或车辆上回来的反射波不同,通过微处理机进行分析,从而做出有车或无车的判断[1]。
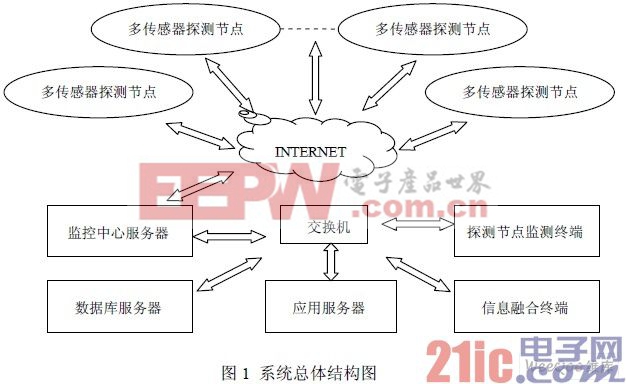
工作原理是安装在该车位上方的车位超声波探测器检测停靠泊位车辆,将该车位已被占用的信号发送到数据采集器, 采集器接收数据时记下停放时间并存入数据存储器。数据采集器对接收到的各车位数据进行即时处理,然后将有关处理结果传送到管理计算机,管理计算机即可将该信息存入系统数据库供查询统计使用[4]。示意图如图1所示:

2.2 车位引导系统
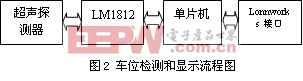
用最短路径算法得到每个停车位的路径后,对每条路径按长度进行排序,在数据库中以此顺序对每个车位对应的路径信息及每条路径所经过的交叉路口所对应的提示信息进行存储,需要到达某个车位停车时,只需从数据库中调出与此车位相关的信息,将这些信息与ID 卡对应起来,在电子显示屏上进行显示[5]。通过超声波探测器将检测信号发送给单片机,通过控制总机给车位发送指示信号,使电子显示屏显示相应车位。在每个车位的上方都有指示灯,通过检测车位,对停放的车位准确做出判断,若指示正确并停放合理,指示灯就会在检测信号发出时自动熄灭,否则就会一直亮着,并通过检测系统发送错误信号给控制总机,从而达到了检测和引导两者统一。其车位检测和显示流程图2所示:
3、遗传算法对最优路径的搜索
对于特大停车场研究比较复杂,先初步建立简单的模型[2],如图3所示:
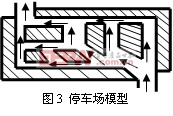
按照图论的构图方法,把图3中的停车场结构示意图抽象为4的赋权有向图E = (V,A,D)。
其中V ={ V1, V2,…, Vn }是有限点集(一个节点代表一个交叉路口或有效泊车位);A = {(Vi, Vj ) ∈N ×N}为有限弧集,|V|=n,|A|=m;D={dij}为边权集, dij为弧(Vi ,Vj)的长度,如果 Vi 与 Vj 之间没有直达路径,则 dij为 ∞(在程序中一般给 dij赋一个足够大的数来做处理)。
路径的连接用 Lij表示。定义如下:
Lij =1 点i到点j存在直达路径
Lij= -1 点j到点i存在直达路径 (3.1)
Lij= 0 点i与点j不存在直达路径
一定时间内,dij是一个不随时间变化的正整数。停车场实际上是一个静态离散网络模型。由于停车场内部通道的单向性,则在数学上,最短路径问题可描述为:
 (3.2)
(3.2)
其中通道是图的边,通道的交叉口和停车位为图点,停车场中两地之间的距离即为权。
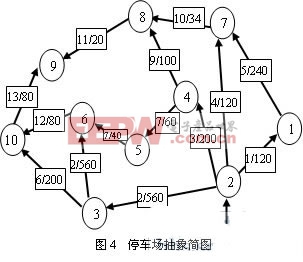
从图4知,若使图3中所示停车位在停车场中经过的距离最短,只要找到点1到10和点10到点9的最短路径。对同一通道两旁的停车位可以把它们作为同一对象来进行研究,即把所研究的停车位所在的通道和此通道两端的交叉口抽象为一个点,即把图4中的点4、点5、边 7’和7’ 抽象成点4,由此我们可以进一步得到图5。
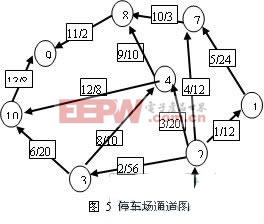
为了求得图3中所示停车位的实际最短路径,先以图5为研究对象,先求出点1到点4和点4到点9 的最短路径。要得到图3中通道上所有停车位的实际最短路径,只要在通道抽象最短路径的基础上加上此通道本身的长度即可。这就取到了最短最优路径。
遗传算法的步骤:
(1) 定义一个目标函数;
(2) 将可行解群体在一定约束条件下初始化,每个可行解用一个向量 X来编码,称为一条染色体,向量的分量代表基因,它对应可行解的某一决策变量;
(3) 计算群体中每条染色体 Xi (i=1,2,…,n)所对应的目标函数值,并以此计算适应值 Fi ,按 Fi 的大小来评价该可行解的好坏;
(4) 以优胜劣汰的机制,将适应值差的染色体淘汰掉,对幸存的染色体根据其适应值的好坏,按概率随机选择,进行繁殖,形成新的群体;
(5) 通过杂交和变异的操作,产生子代;
(6) 对子代群体重复步骤(3)~(5)的操作,进行新一轮遗传进化过程,直到迭代收敛,即找到了最优解或准最优解。
实验表明,本方案采用的基于遗传算法的路径搜索算法对停车场最短路径问题的求解是可行的。
4、现场通讯
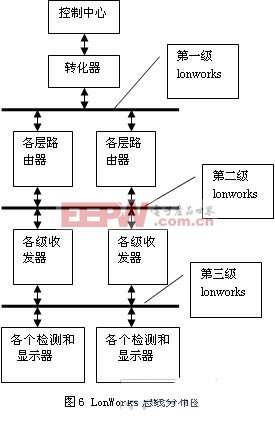
整个系统的通讯选择LonWorks为该系统的通讯总线,LonWorks采用网络变量的设计方式,包括接口Il0在内所有的信息交换均通过网络变量进行,这样给网络的设计带来极大方便。LonWorks技术除拥有现场级控制系统所要求的全部特性外,还具有其他现场总线所不具有的优点:自由网络扑拓结构,灵活而低成本的布线,将LonWorks技术引入到停车场的管理中,充分发挥LonWorks技术低成本,分散控制,互操作性强的特点,提高了系统的性能,场内的每件主要设备均有一块LON模块进行控制[6]。且每块LON模块都采用了CPU标准插板的方式,易与维护。采用LonWork设计该方案的通讯系统,大体分为三级:第一级LonWorks是不同层路由器之间的通讯;第二级LonWorks是同层之间收发器之间和上一级的路由器之间的通讯;第三级LonWorks是同层之间的不同车位与收发器之间的通讯。如图6所示。
5、结束语
本方案综合利用超声探测和车位引导、遗传算法、现场总线通讯等方面的知识,研究了一套自动化程度较高的停车场智能管理子系统,并将目前发展较好的停车场子系统进行整合。系统的实现主要是通过停车位超声探测系统对停车场的停车状况进行实时检测,获取停车位信息,数据处理中心对所探测的信息进行处理,找出当前最方便用户停车的停车位和相应的路径信息,其显示和语音设备根据处理后的信息对用户进行车位引导。随着研究的深入和各种新技术的应用,将大大提高停车场的整体运行效率,对未来特大型停车场的设计具有一定的参考价值。
参考文献
[1] 卢文科,朱长纯,刘君华. 超声波式数字测距仪的研究[J].仪器仪表学报, 2003,(02),218-219.
[2] 邓应伟,张帆. 停车场泊车路径寻优问题研究[J].计算技术与自动化, 2006,25(01),53-54.
[3] 徐琼,陈荣清,官云兰. 基于遗传算法最短路径问题的探讨[J].华东地质学院学报,2003,26(02),168-172.
[4] 高旭东,曹姗姗. 超声波车位检测器系统设计[J].黑龙江科技信息, 2008,(03),31-32.
[5] 任昌锋.停车场通道管理与车位引导的解决方案[J].2005智能建筑与城市信息,2006 ,(01),31-35.
[6] 吴礼雄.Lonworks现场总线控制模块[J].工业控制计算机,1998,(5),41-45.


评论