模糊控制的舵机转向控制方法

图5 e的隶属度函数
由于位置偏差有正负,则舵机转角也有正负,位置模糊控制器输出控制舵机偏转的信号u就有正负。设定u为正时舵机向右偏转,u为负时舵机向左偏转,则u的模糊子集与位置偏差e的模糊子集相似,即u={nb,nm,ns,ze,ps,pm,pb}。将u的大小也量化为七个等级,其论域u={-45,-30,-15,0,15,30,45}。u的隶属函数如图6所示。
控制规则
模糊规则反映了输入输出变量之间的关系,模糊控制规则是模糊控制的核心。
智能车运动时,舵机控制信号u的选择应与位置偏差的大小和符号相关。位置偏差e绝对值较大时应以较大的绝对值的控制信号控制舵机偏转;而位置偏差e绝对值较小时应以较小的绝对值的控制信号控制舵机偏转。当位置偏差e为正,即智能车向左偏离路径时,控制信号控制舵机向右偏转才能减小位置偏差;而当位置偏差e为负,即智能车向右偏离路径时,控制信号控制舵机向左偏转才能减小位置偏差。
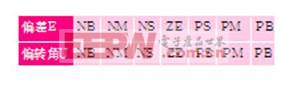
模糊控制规则如表1所示。
表1 模糊控制规则表
模糊推理和清晰化
推理是模糊控制系统的核心。以模糊概念为基础,模糊控制信息可通过模糊蕴涵和模糊逻辑的推理规则来获取,并可实现拟人决策过程。根据模糊输入量(偏差e)和模糊控制规则,模糊推理求解模糊关系方程,获得模糊输出量(偏转角u)。
清晰化是将模糊推理后得到的模糊集转换为用作控制的数字值的过程。可采用重心法的方法清晰化。重心法是指取模糊集隶属函数曲线同基础变量轴所围面积的重心对应的基础变量作为清晰值的方法。
舵机控制策略及算法
对传感器检测到的信号进行量化处理,对应舵机偏转角的计算。另外为了避免从直道入弯的过冲,和从弯道进入直道的振荡问题,程序中还需要对速度进行控制。
量化的过程
智能车通过7个光传感器进行位置的采样,根据传感器的布局,从左至右依次编号为1,2,3,4,5,6,7。由于传感器分布比较密,会出现一个或两个传感器同时检测到黑线的情况,这样可以得到13种路面情况。为了方便处理,将所得到的传感器的信号量化为[1,2,3,4,5,6,7,8,9,10,11,12,13]。
舵机偏转角的计算
通过计算来得到最后的舵机偏转角,具体计算推理过程如下:
(1)将传感器的设计位置投影到基准线上得到的对应偏差从左到右依次为-9,-6,-3,0,3,6,9。与上面的量化处理之后的1,3,5,7,9,11,13对应。这样的话,量化结果可用zadeh表示法来表示其在论域e上的模糊集合,如:10的位置可以表示为。
(2)通过模糊推理,可得到个量化结果的输出量(模糊量),用zadeh表示法表示在论域u上,如10对应的输出结果(模糊量)可以表示为。
(3)再通过重心法清晰化后得到各量化结果对应的输出结果,则10对应的输出结果为0.5×15+0.5×30=22.5。
(4)为了使竞速车在直道上行驶平稳,对量化值5到9的输出结果进行适当调整,使中间6,7,8对应的输出量为0度,其他的相应调整使得角度变化较为平均。
速度的控制
小车匀速行驶时,从直道进入弯道,可能会产生过冲,从弯道进入直道,可能会有振荡,所以必须进行速度调节。具体做法是,在检测到传感器偏出时立即减速,当从偏出回到中心位置时再恢复原速。
试验结果
通过采集当前路况信号,对舵机的转向角进行控制,以实现对小车循迹功能的控制。智能小车前轮转向角度的输出,是通过对舵机输入pwm信号的调制脉宽进行控制的。实验中测出脉宽在8316至9084微秒之间,对应舵机转轴的转角为-45度到+45度,转向机构将舵机转角传递到前轮。忽略舵机的动态响应过程,在舵机处于稳态时,脉宽与前轮的方向转角存在一一对应的映射关系。因此模糊控制器的输出就是控制舵机的脉冲宽度,范围为8316至9084微秒,输出时将论域定为0到768微秒,则对应舵机向左或向右转动45度。本设计中采用的是智能车对黑线的直接变化量作为偏差输入,在给pwm模块设置脉宽时加上8316微秒的偏移量。具体的舵机转角与pwm对应关系如表2所示。
表2 舵机转角与pwm对应关系表

根据本文介绍的模糊算法和传统pid算法为智能车编制了两个控制程序,将这两个控制程序分别下载到同一个智能车的mcu中,并在跑道上运行。通过多次对比,把制作完成的智能小车放到特定的跑道上进行试验,如图7、图8、图9、图10,实验结果表明,小车都能很好的、快速的在规定的轨道内行驶。基于模糊控制的转向控制器在直线、曲率半径大的弯道、曲率半径小的弯道、蛇形弯处行驶是都可以实现智能车辆的转向控制,转向稳定性较好。

图7 小车行驶在直道中

图8 小车行驶在曲率半径大的弯道中


pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理




评论