基于C51单片机的汽车嵌入式车载防盗系统设计方案
2)每台终端在使用前需要进行初始化设置。该设置是通过串口来完成的,通过复用与GPS连接的串口来实现终端设备的初始化。需要定义好其通信协议和需要配置的具体内容。
3)该终端安装在汽车比较隐蔽的地方,采用汽车电源供电的方式。该终端的主要功能是负责GPS信号的接收处理、告警数据的上报、中心控制命令的接收、处理及命令的执行等工作。
4)GPRS模块采用法国WAVECOM公司Q2406B,上传速率可达2618kbits/s,下载速率可达5316kbits/s。GPS模块有以下两种选择:
a)直接选择串口连接方式的GPRSMODEM。
b)选择内置的GPRS模块外加天线的设计方法。
采用第一种方法可以降低开发和维护的难度,而且安装方便,但是成本比较高。第二种方法需要在硬件上设计相关的电路,开发难度较大,不过可以降低成本。
5)车轮速度传感器也叫轮速传感器或转速传感器,它可以测出车轮与驱动轴共同旋转的齿圈数,然后产生与车轮转速成正比的交流信号。车轮速度传感器信号通过ADC电路转换为数字信号传送给CPU进行判读。
3.4任务的设计
通过对图2以及系统功能的分析我们将系统软件划分为多个任务,任务的名称,任务周期以及执行时间等信息如表1所列。
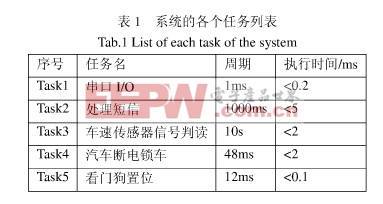
在表列出的各项任务中,Task1每1ms对buffer进行查询,如果有需要收发的信息,马上通过串口收发。串口收到的string流存放到缓冲区中,交给Task2进行处理。Task2周期为1s,负责PUD短信的编解码,对命令的识别和控制信号的发送,它是系统中最耗费资源的任务。Task3每隔10s执行一次,它对车速传感器采集的信号进行判别,如果需要告警,则将消息发送给Task2进行处理。Task4每48ms检测一次消息,完成对汽车控制信号的发送。Task5在小于16383个CPU机器周期内(这里以12ms为周期),对看门狗进行置位,保证系统的正常运行。
根据合作式调度器的原理与各任务的周期,设置定时器每1ms产生一个周期中断信号。因为有多个任务的执行时间超过1ms,Task1无法按规定的频率执行。因此采用直接将Task1包含进定时器中断服务子程序的方法,从而使所有任务的周期及执行时间均能满足系统任务可调度的要求。
在工程中采用事件触发模式很大程度上会增加系统的复杂性,导致庞大的代码结构。这样的代码长度及复杂性不适合普通开发人员构建,而商业实时操作系统往往价格昂贵,并且需要很大的操作系统开销。采用基于时间触发模式开发系统可以满足实时、简单、可预测性等工程要求。在应用实例中也可以看到,对于任务周期与执行时间相差悬殊的任务,为满足可调度性的要求,将需频繁执行的短任务加入定时器中断服务子程序的方法延长了中断处理的时间,同时削弱了系统实时响应能力及可预测能力。此外,也可以通过将执行时间长的任务分解成几个执行时间短的任务来满足任务可调度性。相对于事件触发模式,时间触发模式对工程技术人员的要求更高。
4.结语
通过软硬件的设计,汽车防盗系统实现了对汽车的实时监控和报警,并能实现硬件硬件防盗功能。汽车电子中嵌入式系统得到了大量运用,如何整合汽车的原有资源,设计出强大而且实用的应用,将是未来汽车嵌入式开发的目标。












评论