用数字集成电路设计的里程表
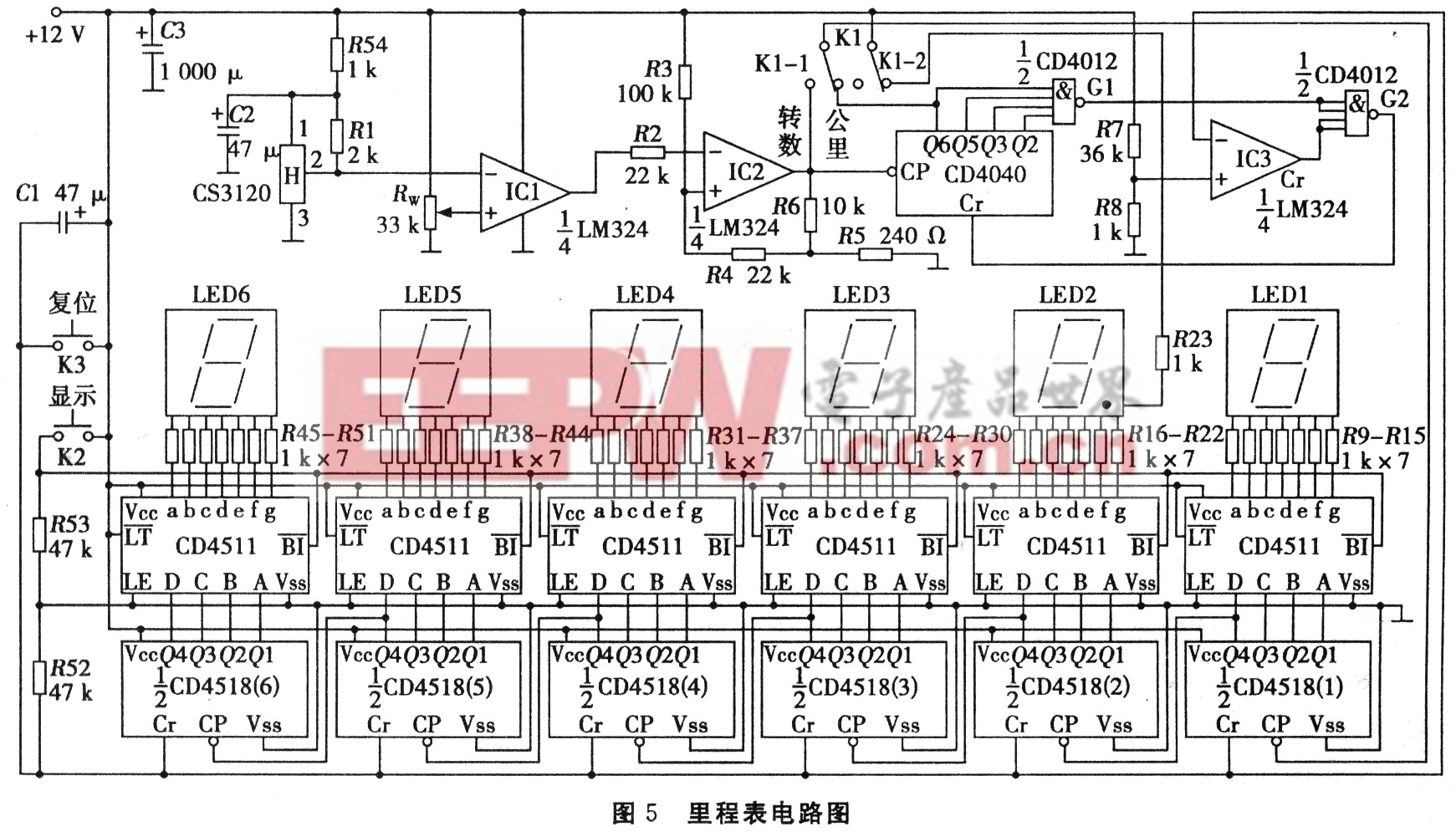
笔者实测某车轮的周长为1.834米,则在100米内,车轮转动54圈。据此,将任意进制计数器设计成54进制。由图5知,当CD4040输人54个脉冲后,其Q12~Q1十二个输出中,Q6、Q5、Q3,Q2为高电平,该高电平信号经与非门G1后输出低电平,再经与非门G2反相变为高电平加至 CD4040的Cr复位端使其复位,从而实现54进制计数。同时,第54个脉冲过后,Q6下跳信号加至十进制计数器CD4518(1)的CP端(K3处于图示位置),使其加1。可见,十进制计数器的最低位每输入一个脉冲,表示车前进了100米,即0.1公里。其余十进制计数器记录的依次为里程的个位~万位。本文引用地址:http://www.eepw.com.cn/article/195700.htm
2.4 其它电路
K1是双刀双掷开关,用于显示器工作状态选择。置于“公里”一边,LED2的小数点因K1-2闭合得电而显示,显示器显示的是公里数;置于“转数”一边因K1-2断路小数点失电不再显示,且由于十进制计数器直接接收脉冲信号,显示器显示车轮旋转圈数。
译码电路CD4511能直接推动LED数码管工作。它的BI灭灯控制端,低电平有效。该控制端通过开关K2接至+12 V电源上。平时BI为低电平处于灭灯状态,数码管不显示以节省电能;当按下K2时,数码管工作显示里程或车轮旋转圈数。当然,也可去掉K2,将BI与+ 12 V短接,则数码管始终处于工作状态。LT、LE是它的试灯控制与锁定允许输入端,均已接无效电平。
C1、R52以及IC3等构成上电复位电路,这里IC3被用作反相器。上电时+12 V的高电平通过C1加至六个十进制计数器的Cr端使它们复位;同时这个复位信号经IC3、G2后又加至CD4040的Cr端使它也复位。复位开关K3按下时的工作过程与此相同。
电路需要+12 V电源,可用车上的蓄电池供电。如果蓄电池电压超过12 V,应通过稳压电路供电,例如用三端稳压块7812或LM317等进行稳压。
3 结束语
电路只有一个参数需要调试,通过调整Rw改变IC1同相端的电压。应保证在霍尔集成电路H与磁钢距离最近时,该端电压高于其反相端(即霍尔集成电路输出端)的电压;霍尔集成电路远离磁钢时,该端电压低于其反相端的电压。由于100米不可能恰好等于车轮周长的整数倍,故计量结果会产生误差,其误差的大小与车轮实际尺寸有关。对于1.834米周长的车轮。误差为1%。当K1置于“转数”一边时,显示器显示的结果再乘以车轮周长可得到误差更小的结果。如果相应地增加CD4518和LED数码管的数量,可扩大量程。


评论