基于EPA的光栅位移测量系统
目前,国内研究和开发数控定位装置的单位都在研制各种经济型的工作台产品,一般定位精度为1 μm、5 μm、10 μm。工作台的结构布局、位移量的大小、测量速度等都越来越趋于灵活,自动化程度也越来越高,但是这些工作台大多数都是单机监控的分散结构,有些是通过RS485、现场总线、PLC等把设备连接在一起,构成简单的DCS或FCS网络测量系统。利用这些方法构成的系统具有成本高、测量范围小、速度低、不稳定和支持应用有限等缺陷,因而其发展受到了极大的限制。相反,工业以太网以其统一的TCP/IP协议和CSMA/CD多路访问方式使其得到了迅猛发展,以太网不仅具有廉价、高速、简易、方便的特性,而且传输速率高、信息量大、兼容性强,所以受到许多工业监控现场总线开发机构的高度重视。
本文介绍的基于EPA的光栅位移测量系统,具有功能易于拓展、联网方便、造价低廉的特点,可很好地满足航空航天、精密机械仪器、数控机床等领域中精密位移测量及定位的需要。
1 光栅位移测量系统硬件选型
1.1 主控制器DS80C410微处理器
DS80C410是快速的与8051兼容的高度集成的网络微控制器。它执行指令的速度比普通的8051快3倍。它的外围设备包括10/100 Mbps的以太网MAC,2个串行端口,1个CAN2.0控制器,1个l-wrie控制器和64个I/O引脚。为了能访问网络,ROM里嵌入了完全的TCPIPv4/6协议栈和操作系统。网络协议栈同时支持32个TCP连接而且可以通过以太网MAC以5 Mbps的速率传输数据。
对于半双工操作模式,DS80C410和网络上其他节点一起共享以太网物理介质。DS80C410访问物理介质时遵守以太网的带冲突检测的载波侦听多路访问协议(CS-MA/CD)。MAC在试图发送以前等待物理载体空闲。由于网络中有很多节点,所以在发送时不同的节点可能发生冲突。当检测到冲突时,MAC在尝试再次发送前等待一个随机时隙。除非有指令干涉,否则MAC再尝试发送这个冲突帧,发送16次以后自动放弃这个发送帧。对于全双工通信模式,物理介质和DS80C410直接连接到另外一个节点上,允许同时发送和接收数据,而不会发生冲突,因此不需要介质访问方法。对于全双工通信,流控制机制使用PAUSE控制帧。当需要时间释放接收数据缓冲区时,DS80C410可以初始化PSUSE帧,请求其他的尝试发送帧的节点挂起几个时隙。
和其他单片机相比,DS80C410的指令操作功能强大,不需要外扩存储器。内部集成的2个串口,便于整个系统的功能升级和扩展。除了组建工业以太网接口电路所用到的端口外,还有大量的闲置端口可以用来实现其他用途,同时系统能够实现在工业现场以10/100 Mbps的网络传输速度进行实时通信,便于系统实现网络化测试。另外,它执行指令的速度比普通的8051快3倍,所以有利于提高系统的响应时间。综合考虑之后,选择DS80C410作为整个光栅位移测量系统的主控制器。
1.2 以太网收发芯片LXT972ALC
本设计中需要一个传输介质为双绞线的以太网接口,这里采用的Intel公司的LXT972ALC就是这样一个接收发送芯片。它遵守快速以太网协议,支持10/100 MbpsMAC标准。LXT972ALC设备实现了标准IEEE802.3定义的MII。提供了从MAC到LXT972ALC数据传输的独立通道。每一个通道都有各自的时钟、数据总线和控制信号。
1.3 网络变压器
以太网收发芯片LXT972ALC输出数据还要通过网络隔离变压器实现对信号的处理,网络隔离变压器的作用就是把信号转换成平衡信号传输,以减少共模干扰,提高数据传输距离。设计中采用了Belfuse的S558-5999-T7网络隔离变压器。变压器的两个输入和两个输出分别连接以太网收发芯片LXT972ALC的TPIP/N、TPOP/N和RJ45。
2 传感器
传感器的类型是多种多样的,其优缺点也各有侧重。相比较而言,光栅传感器不仅具有高速、高精度、非接触测量等优点,而且位移检测有较大的放大率以及误差平均效应,所以广泛应用于位移精密测量和精密定位控制领域。
2.1 光栅位移测量的基本原理
光栅传感器主要是由标尺光栅、指示光栅和光电器件(发光和光敏器件)组成,当两块光栅以微小夹角重叠时会产生干涉,在与光栅刻线大致垂直的方向上形成亮暗相间的干涉条纹,即所谓莫尔条纹。随着两光栅的相对移动,条纹也发生移动,在固定的光敏器件上就会有光的亮暗变化,对亮暗变化周期进行计数,按照一定的对应关系即可计算出两光栅的相对位移,这就是光栅测量位移的基本原理。一般,莫尔条纹的宽度远大于光栅栅格的宽度,因而,莫尔条纹实际上起到了光学放大作用。其放大倍数为

其中T为莫尔条纹的间距,d为光栅的栅格宽度,θ为两光栅刻线夹角(单位为弧度)。光栅的栅格宽度是直接影响测量分辨率和精度的重要因素。对于不同的光栅尺,其测量的分辨率、精度以及量程都不一样。光栅传感器的栅距通常为0.02 mm(50线对/mm)、0.04 mm(25线对,/mm)。输出信号有相位角差90°的两路方波信号和相位角依次差90°的四路正弦信号。由于方波信号为数字量,不需要A/D转换,DS80C410就可以直接进行处理,所以本文重点讨论方波输入信号,而对于正弦波信号,经过整形可变为方波信号输出。
本文采用高阈值逻辑(HTL)信号输出的SGC-4.2光栅尺作为位移测量元件。这种光栅尺的特点是阈值电压比较高,因此它的噪声容限比较大,有较强的抗干扰能力。它的主要缺点是工作速度比较低,所以多用在对工作速度要求不高而对抗干扰能力要求较高的一些工业控制设备中。
2.2 四倍频电路设计原理
在实际应用中,光栅传感器输出两路相位相差为90°的方波信号A和B。如图1所示,用A、B两相信号的脉冲数表示光栅走过的位移量,标志光栅分正向与反向移动。四倍频后的信号经计数器计数后转化为相对位置。实现计数过程一般有两种方法:一是由微处理器内部定时计数器实现;二是由可逆计数器实现对正反向脉冲的计数。
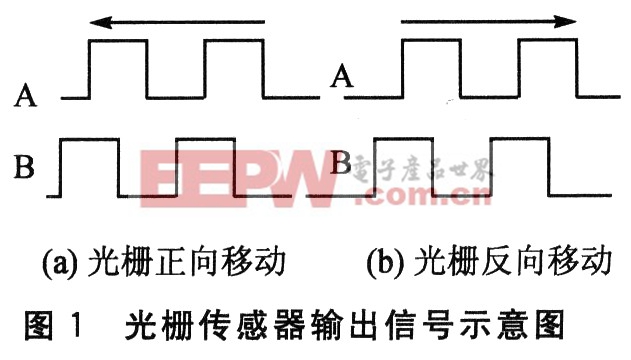
光栅信号A、B有以下关系:
①当光栅正向移动时,光栅输出的A相信号的相位超前B相90°,则在一个周期内,两相信号共有4次相对变化:00-10-11-01-00。这样:每发生1次变化,可逆计数器便实现1次加计数,1个周期内共可实现4次加计数,从而实现正转状态的四倍频计数。
②当光栅反向移动时,光栅输出的A相信号的相位滞后于B相信号90°,则一个周期内两相信号也有4次相对变化:00-01-11-10-00。同理,如果每发生1次变化,可逆计数器便实现1次减计数,在1个周期内,共可实现4次减计数,就实现了反转状态的四倍频计数。
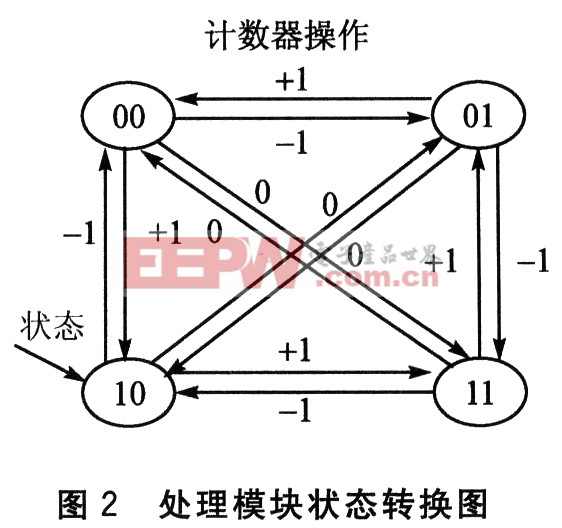
③当线路受到干扰或出现故障时,可能出现其他状态转换,此时计数器不进行计数操作。
综合上述分析,可以做出处理模块状态转换图,如图2所示。其中“+”、“-”分别表示计数器加/减1,“0”表示计数器不动作。
3 光栅位移测量系统的总体设计
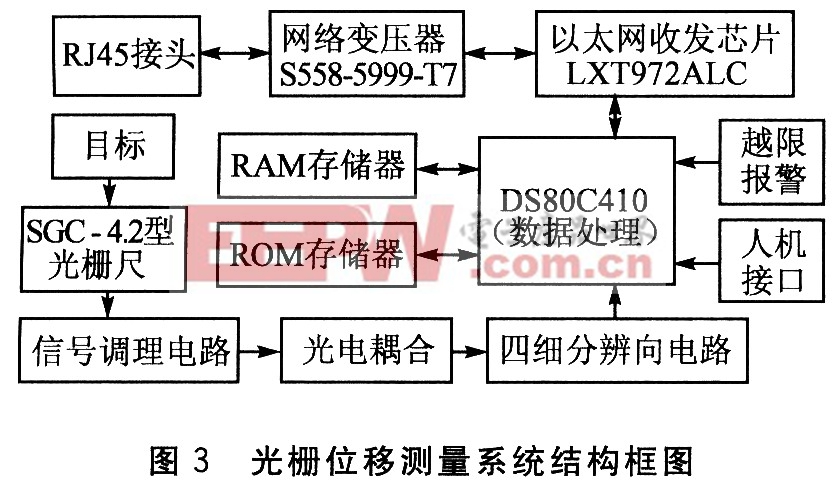
光栅位移测量系统的结构框图如图3所示。系统工作时,SGC-4.2光栅尺将位置信号先转化成HTL电压信号输出,经过调理电路滤波和整流后,处理成标准的方波信号。然后控制器DS80C410通过内部高速计数器对外部的方波信号进行计数运算。一方面向伺服驱动器发布电机动作指令,控制电机驱动位移执行机构运动;另一方面通过以太网收发芯片XT972ALC进行读写操作,将工业现场的测量信息上传到工业以太网络上,便于管理者进行全局决策。
4 光栅位移测量系统的硬件设计
光栅位移测量系统的硬件实现主要包括位移检测电路、电源电路、人机接口和声光报警电路以及工业以太网接口电路的设计。
4.1 基于集成芯片的光栅位移检测电路
光栅信号检测电路可以由光敏三极管、比较器LM339、2片74193串联组成。但是这种设计方案往往需要增加较多的可编程计数器,电路元器件众多、结构复杂、功耗增加、稳定性下降。因此,本文对经过SGC-4.2型光栅尺(50线/mm)出来的脉冲信号进行倍频处理时,选择4倍频专用集成电路芯片QA740210来实现,对信号4细分后,可得分辨率为5μm的计数脉冲,这在工业测控中已达到了很高的精确度。QA740210集成电路可将两路正交的方波进行四倍频,并能根据输入信号的相位关系进行相位判别,产生2路加、减计数信号,可直接送到DS80C410高速计数器进行计数。











评论