将由CompactRIO硬件平台控制的高精度机器人设备用

挑战:创建一个高精度的监督和控制系统,该系统能够在微创神经外科中,安全地移动机器人。
解决方案:使用NI CompactRIO平台开发一个安全的、统更合理、更灵活且更可靠的高性能机器人控制系统。
“由于CompactRIO硬件平台及其灵活的编程环境,目前的解决方案比原来的原型设计更合理,可靠和有效率。”
机器人设备应用于医疗行业已有40多年,目前研究人员仍然在不断致力于开发出更加有效、安全的医用机器人。有的工作站由于环境恶劣等缘故而只能由机器人进行操作,相比于这些工业机器人,医用机器人的工作必须与病人和医务人员进行直接接触。因此,医疗领域使用的机器人对安全性能的要求比工业领域更为复杂和严格。
这一挑战对于神经外科表现尤为明显――因为在手术中,需要要求极高的精确度来定位外科手术工具。机器人可以比最有经验的神经外科医生实现更高的精确度和重复性。然而,他们不能对危险和突发事件作出及时和自主的响应。
神经外科触觉设备
由于外科医生不能将整个手术操作过程委托给一个机器人,因此最佳的机器人解决方案由主/从工作方式来实现。外科医生指定一个动作给机器人设备,然后机器人移动手术仪器进行精确定位。
由于这一主/从工作方式,外科医生不能直接与仪器接触,他们通过能重现人工手术操作中所有特有感觉的特殊传感器,与手术操作过程保持一定程度的连接。这些被称为触觉设备的传感器能在指令设备上重现力量感觉。该解决方案使机器人的工作安全状况大大提高,因为机器人的所有动作都由外科医生合理进行控制。
机电一体化与医用机器人和触觉主/从机器人系统协同工作已经超过10年,它也担负起开发微创神经外科手术机器人应用控制系统的挑战。在此应用中,手术工具是一个肿瘤病变治疗的特殊设备,该设备被称为光子放射外科系统―ZEISS(PRS)。
PRS系统是一个低能量X-射线微型源,从插入颅腔中的探针头上发出辐射。PRS允许外科医生对肿瘤病变限定辐射量,以避免辐射线与脑组织的正常良好区域接触。这种治疗方式是微创性治疗,因为探头从直径只有3至7毫米大小的洞中穿过。就病人的脑损伤和后期手术恢复方面而言,微创性治疗具有很大的优势。
以前,外科医生必须通过定位被称为立体定向头盔的金属结构上的设备,进行PRS系统的手动控制(如图1)。发射探头通过齿条传动穿过颅腔。金属结构作为定位神经外科手术仪器的三维参考。然而,人工控制不能提供较高的定位精度,并且其功效在PRS系统应用中仅局限于并不多见的球形肿瘤。
用于神经外科的线性驱动器(LANS)
我们将注意力集中在把PRS系统的应用扩展到更为常见的椭圆肿瘤病变的病人。辐射量必须沿肿瘤病变的主轴进行分布,从而使辐射球形范围可以覆盖到整个肿瘤病变区。由于执行该动作需要一定的精度,因此需要用到机器人系统。所以,我们开发了用于神经外科的线性驱动器(LANS)。
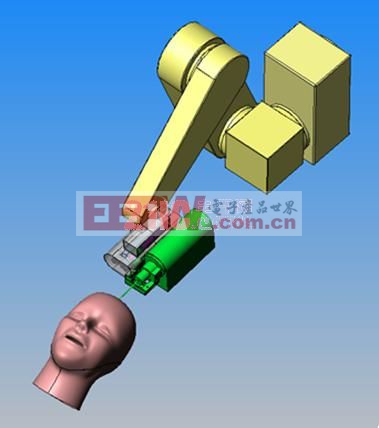
神经外科线性驱动器是一个机器人设备,用于在触觉主/从操作过程中以线性方式移动PRS微型源。研究人员使用一个来自英国的商业机器人NeuroMate,作为LANS的空间定位器。这样使得手术进展过程中微型源的轴,沿着肿瘤病变的主轴移动(如图2)。外科医生决定着颅腔内探头的运动。









评论